
Lego Motions — Tribot v 1.0
Seeing Your Creation Move — Move Steering Block — Episode #04
Seeing your creation move is one of the most exciting and fascinating things about making a robot. videos? click here now!
In this Episode, we’re gonna explore the setup of Large Motor from EV3 31313 :)

The EV3 Large Servo Motor is a powerful motor that uses tacho feedback for precise control to within one degree of accuracy. By using the built-in rotation sensor, the intelligent motor can be made to align with other motors on the robot so that it can drive in a straight line at the same speed.
It can also be used to give an accurate reading for experiments. The motor case design also makes it easy to assemble gear trains.
Characteristics:
Description Ev3 Large Motor:
– Tacho feedback to one degree of accuracy;
- Precise movement;
– 160–170 PEAK RPM;
– Running torque of 20 N/cm (approximately 30 oz/in);
– Stall torque of 40 N/cm (approximately 60 oz/in);
– Auto-ID is built into the EV3 software;
- It has an unusual shape;
- Inside it is a set of gears, electric controller circuit (build-in rotation sensor);
- Weight = 82gSteering Blocks
The settings you choose will depend on how you construct the Robot and what you want it to do.
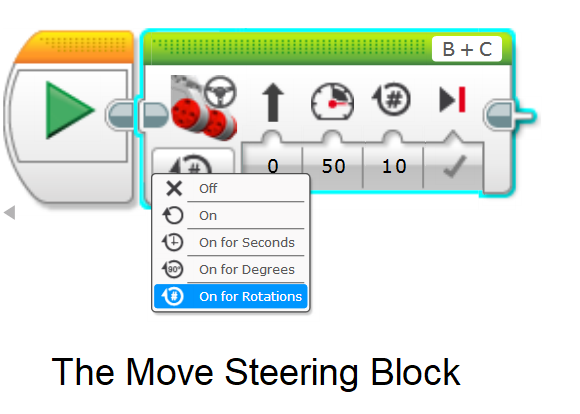
Mode
Off -> Turn off the motor;
On -> Stay on until prog ends or tunned off by another block;
On For Rotation -> Move the motor determined number of turns;
On For Degrees -> Moves the motor determined number of degrees;
On For Seconds -> Move the motor determined number of seconds.Steering
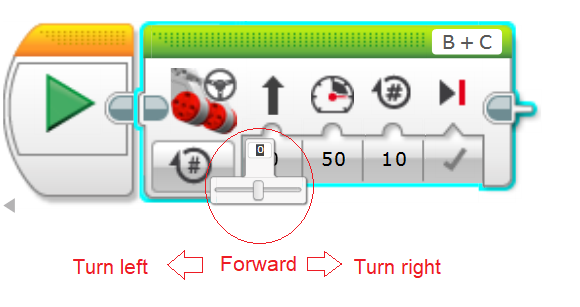
Slider to the middle the robot move straightPower
Positive value move the motor forward; negative, backward;
Applying 100 the motor runs it as fast as it can :)Duration
In order to know how much a spin is worth, solve for circumference or see this video =D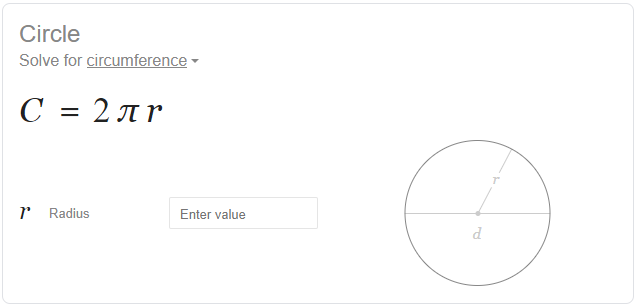
Brake At End
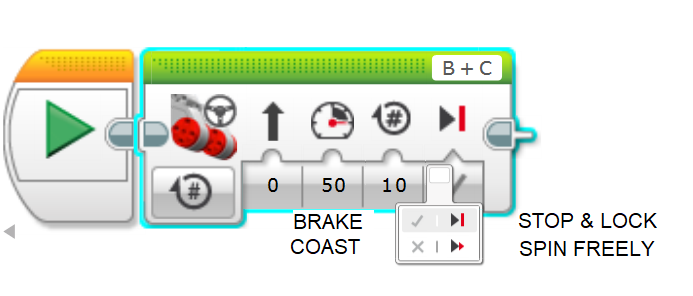
Port B = Left Motor
Port C = Right Motor
Port View
- Port View is a Big help :D it says how far each motor has moved;
- You can move motor by hand to determine the distance you want it to go;
- Values are reset to zero at the start;
- You can add Wait Block to make the program pause if you want to check the value at various steps.Please see this video for my laboratory about the Move Steering Block:
That’s all for now, folks.
See you soon!
Bye o/
Related Posts:
01º Lego Episode — Our Startup’s Journey — Invaders and Invasions?
02º Lego Episode — Timmyton — Lego-Learning-By-Playing — L2BP Series
04º Lego Episode — Lego Motions — Tribot v 1.0 — Seeing Your Creation Move — Move Steering Block
05º Lego Episode — Lego Motions — Move Tribot Around — And Backward…Five Programs Files
06º Lego Episode — Lego Sensors — Touch N Color — Two out of five human senses — Touch N Sight
07º Lego Episode — Lego Sensor — LineFollower — Line Follower Tribot v1.0
08º Lego Episode — Maze Solving Robot v1 — Lego Solution Right-Wall-Follower-Robot
09° Lego Episode — Gettle_&_Sound_Bots — How gentle can a robot be? What is the audible range of the human ear? How deep can we dive?
10° Lego Episode — Data Logging — Data Collection and the EV3
11º Lego Episode — Binning the LineFollower Code — Binning: Arithmetic To Map Sensor Reading
12º Lego Episode — A Proportional LineFollower Robot — Advanced Math To Improve Your Robot’s Steering
13º LEGO Theory — Theory of Multitasking — A very Useful Programming Technique
14º LEGO formula — Normalizing Data — Converting Data to Use The Same Range
15º Lego Episode — PID — The Ultimate Line Follower — Algorithm for your EV3 PID Line Follower Robot
16° Lego Meets Pixy Episode — How to Connect Your Inexpensive Camera Module to Lego
18° Lego Episode — GEARS & WORMS — Geartrains & Worm & Clutch Gears
23° Lego Episode — Differential Explained — How Differential Works?
24° Lego Episode — PitBot — A Star Is Born — Working at The First Structure in Our Sparring Robot
25° Lego Episode — PitBot Is Agressive? Well, No Worries! — Making PitBot bite!
26° Lego Episode — Dancing Good w/ PitBot — All The Secret for Replicate This Awesome Robot
27 ° LEGO Episode — Sumo Arena is Ready! — Here is the playing arena for Arduino x Lego
28 ° LEGO Episode — Pick Pitbot Up! — Our Robot Are Leaving Body & Paint Shop
28 ° LEGO — B — Episode — Pitbot Battery & Sensor Setup — Preparing The infrastructure for running Arduino code
29 ° LEGO Episode — Bridging All Sensors Together — Pitbot — Collecting All Codes for the Final Act of Giving Behaviors to Robot
Credits & References
Book: The Art of Lego Mindstorms EV3 Programming by Terry Griffin
EV3 Large and NXT Motors — The Differences Explained
Building Instructions & Program Descriptions
LEGO® 9V Technic Motors compared characteristics