
Machine Learning Art
How do we control robots?
Deep Reinforcement Learning

What is a controlled robot, exactly?
A controlled robot does not have the same independence. Consider a controlled robot as if you were using a remote control to move it around and instruct it where to go. This isn’t to suggest that a remote control can’t or won’t operate an autonomous robot. What happens if the pilot is you, and your body to be exact
- May 2022 — AI art tools update can be found ➡️ HERE ⬅️
A relentless robotic worker entering dangerous areas has long been a pipe dream for roboticists. Many academics have pursued this objective from different angles, such as model-based control or learning algorithms, to produce autonomous robotic systems. However, when knowledge is scarce in unforeseeable events, such as catastrophes, a completely independent agent may not function. This constraint highlights the need for a more adaptable control system that may be used in various situations.
Non-humanoid Robots
A motion-based control interface offers flexible robot operations in risky contexts by merging human intuitions with the robot’s motor capabilities. Designing a motion interface for non-humanoid robots, such as quadrupeds or hexapods, is more difficult since their motions are governed by different dynamics and control techniques. The authors present a unique motion control method that seamlessly enables a human user to manage a quadrupedal robot.
Project Page (scroll down)
Supervised Learning
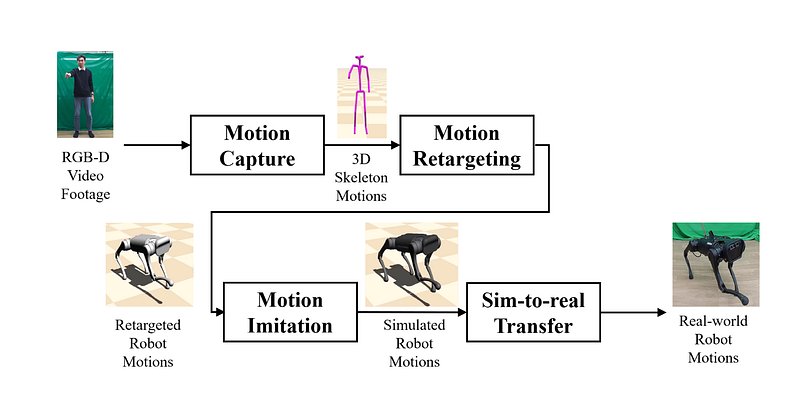
They use supervised learning and post-processing approaches to retarget the acquired human motion into the equivalent robot motion with suitable semantics. Then they combine motion imitation with curriculum learning to create a control policy that can monitor a retargeted reference. The authors educate a group of specialists to increase the performance of both motion retargeting and motion imitation. They show how the new system can perform numerous motor activities on simulated and actual quadrupeds, including standing, sitting, tilting, manipulating, walking, and turning. They also undertake research to determine how each component affects performance.
Can a robot be controlled by a human brain? Researchers have collaborated to create a machine-learning algorithm that can be linked to a human brain and used to control a robot. Based on electrical inputs from the brain, the algorithm changes the robot’s motions.
Controlled by Motion
Human motion control enables the robot body to be controlled directly by human movements. Motion control systems free the human operator from using typical control devices (such as joysticks and keyboards), allowing the operator to better communicate their intentions to the robot controller. As a result, in computer animation and robotics, human posture-based control has received a lot of attention.
Microsoft Azure Kinect
The authors create a technique for directing a quadrupedal robot using the actions of a human operator. In their example, any motion capture technology, such as Microsoft Azure Kinect, may send human movements to the system. The motion retargeting module turns the collected human motion into a physically valid and semantically correct robot reference motion. They use a hierarchical strategy to develop a group of expert mappers while using optimization-based post-processing approaches to accomplish this aim. Then, using deep reinforcement learning, they develop a control strategy that can duplicate the supplied retargeted robot motion. Finally, the authors create powerful expert rules using curriculum learning and integrate them as a state machine with extra transition controllers for more robust and flexible control.
The project’s purpose is to build robotic employees for hazardous areas. Combining the suggested system with virtual reality devices to give more immersive experiences would, in my opinion, be a significant step forward in this sector. However, this expansion will generate new research problems, such as which robot sensory input is required for people to correctly control the robot and how to cope with additional delays.
What is the best remote control robot?
Keywords: computer vision, Artificial Intelligence, Machine Learning, AI art, art, digital art, robotics, Microsoft Azure Kinect, Human motion control,
I invite you to explore the concept of “AI creativity” by reading and learning from the many articles found on 🔵 MLearning.ai 🟠
- Check out my instagram with new material every week
- If you enjoyed this, follow me on Medium for more
- Want to collaborate? Let’s connect on LinkedIn
- https://linktr.ee/evartology
Data Scientists must think like an artist when finding a solution when creating a piece of code. Artists enjoy working on interesting problems, even if there is no obvious answer.
All our writers (members) receive the opportunity to be promoted on our social media, which increases the popularity of articles published on MLearning.ai
- Linkedin (11.1K+ ML-professionals)
- Twitter (4.8K+ followers)
- Instagram (2.2K + followers )
- Sketchfab * — individual vRooML!
- Youtube
- Apple Podcasts
- Substack
@INPROCEEDINGS{kim2022human,AUTHOR = {Sunwoo Kim and Maks Sorokin and Jehee Lee and Sehoon Ha}, TITLE = {Human Motion Control of Quadrupedal Robots using Deep Reinforcement Learning}, BOOKTITLE = {Proceedings of Robotics: Science and Systems}, YEAR = {2022}, ADDRESS = {New York, USA},MONTH = {June}}





