
Lagrangian Mechanics: An Alternative to the Traditional Newtonian Formulation
In this article, I will introduce a field in classical mechanics known as Lagrangian mechanics and one application of this formulation.
What is Lagrangian Mechanics?
First introduced by Italian-French mathematician and astronomer Joseph-Louis Lagrange in 1788, Lagrangian mechanics is a formulation of classical mechanics that can act as an alternative to the traditional Newtonian formulation.
Lagrangian mechanics relies on an important principle known as Hamilton’s Principle and is as follows:
The actual path which a particle follows from two points 1 and 2 in a given time interval, t₁ to t₂ is such that the following action integral is stationary when taken along the actual path:
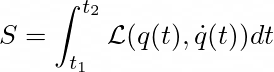
In the above expression, S is known as known as the action and the fancy L is known as the Lagrangian and is defined as the kinetic energy minus the potential energy. q(t), in this case refers to a certain ‘degree of freedom’ that the object is moving along, whether that be the x-axis, y-axis, or any other coordinate system. Also, if you aren’t familiar with the notation, the dot on top of the q indicates a single derivative with respect to time.
Now, in order to exploit this principle, a field in mathematics known as calculus of variations can be used which I have introduced in this article. Recognizing that the correct path, q(t) makes the action integral stationary, we know using calculus of variations, that q(t) must obey the following Euler-Lagrange equation:
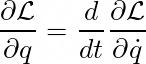
For the sake of this article, I will only be looking at the case where there is only one degree of freedom, but if there are multiple then there will be multiple Euler-Lagrange equations corresponding to each degree of freedom.
The Pendulum
Since it may still be unclear how the Euler-Lagrange equation will come into play, it may help to look at a simple example:
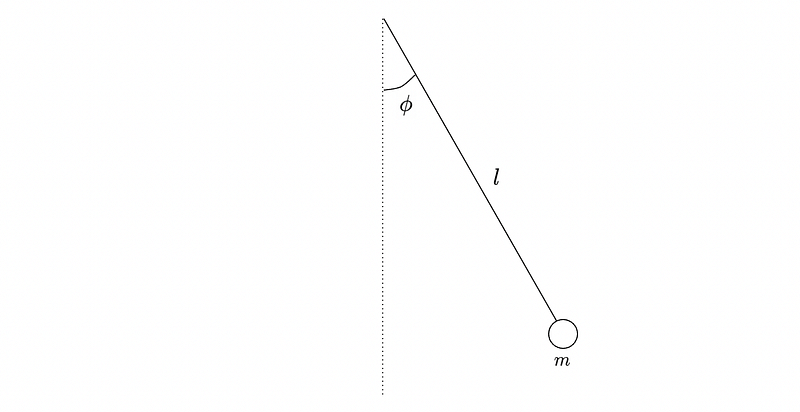
Consider the pendulum illustrated above with a bob of mass m and string of length l. While it is true that the bob is moving in two dimensions, it actually has only one degree of freedom since the y position is actually dependent on the x position as the bob can be assumed to be constrained to a circle. This is why it is called a ‘degree of freedom’ and not a dimension as the x and y coordinates cannot actually move freely and independently from each other. In fact, it would be more convenient to choose the angle, φ, as our degree of freedom we wish to observe as any possible position of the bob can be described by a unique φ value. Hence, we will let q(t) be φ(t).
Next, we must find an expression for the Lagrangian which is the kinetic energy minus the potential energy (gravitational PE in this case). Starting with the kinetic energy, this will equal 1/2 mv² which can be rewritten in terms of φ as such:
The velocity can be rewritten like this by using the fact the velocity of a rotating object is the radius of the rotation multiplied by the angular velocity. For the gravitational PE, it is a bit trickier since the h term in mgh must be expressed in terms of φ, but it can be done using some trigonometry as illustrated in this diagram:
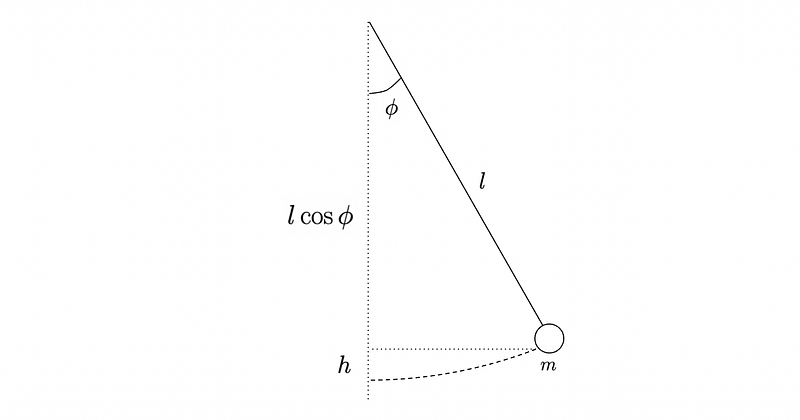
Using the above diagram, it is clear that h = l - l cosφ and hence the gravitational PE will be equal to mgl(1-cosφ). Combining these together, the Lagrangian for the system can be expressed as shown below:

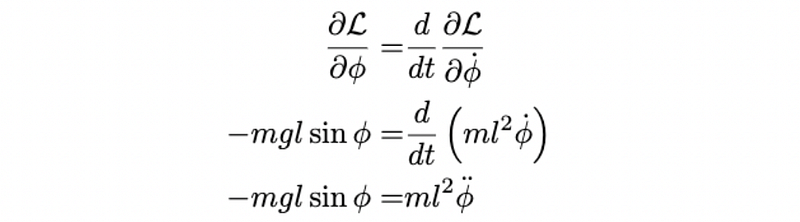
Now we can substitute this into the Euler-Lagrange equation and simplify by evaluating the derivatives:
Finally, after simplifying and rearranging, we get this following differential equation:
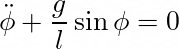
If you are familiar with physics or even mathematics, you may recognize this non-linear differential equation as the differential equation for a simple pendulum which can be derived through Newtonian mechanics, showing that Lagrangian mechanics does indeed work.
Why Lagrangian Mechanics?
Now, I would like to finish off discussing why Lagrangian mechanics is so powerful since many of you may be wondering why we went through all that effort just to derive an equation that could’ve been derived using Newtonian mechanics. The reason lies in the fact that I have never actually mentioned force a single time throughout this whole article despite it being at the core of Newtonian mechanics. Instead, Lagrangian mechanics solely makes use of energy to predict the motion of objects. While it may not seem like it, this is quite a significant difference as Newtonian mechanics is centered around the notion of ’cause and effect’, with the cause being the force applied and the effect being the acceleration that results from that. On the other hand, Lagrangian mechanics considers all possible pathways at once and the energy changes that could occur along them.
This proves to be quite beneficial in complex systems where multiple forces are acting on multiple objects. For example, the infamous double pendulum involves two gravitational forces as well as multiple tension forces that are constantly changing in both magnitude and direction. With Newtonian mechanics this would be a pain to deal with, but using Lagrangian mechanics the process is significantly simpler as energy is a scalar value.
While this article was far from fully encapsulating the elegance of Lagrangian mechanics, I hope it acts as an introduction for those interested in learning more. Thank you for reading.
References
Taylor, J. R. (2005). Classical mechanics. University Science Books.