
YOLOv10 vs. YOLOv8: A Comparative Analysis
Overview of YOLOv10
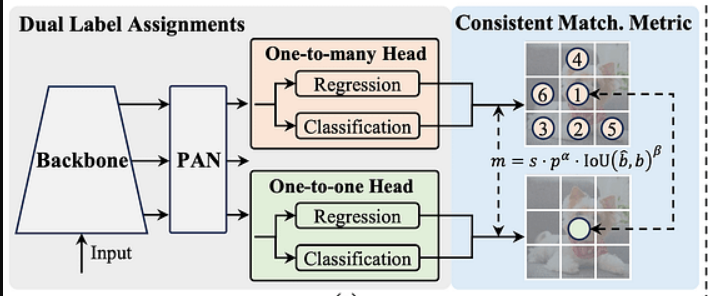
YOLOv10, introduced by researchers from Tsinghua University, aims to advance real-time object detection by optimizing both the model architecture and the post-processing pipeline. The new model incorporates a consistent dual assignment strategy for NMS-free training, enhancing efficiency and performance simultaneously. Key features include a lightweight classification head, spatial-channel decoupled downsampling, and rank-guided block design, all contributing to reduced computational overhead and improved capability.
YOLOv8 and YOLOv10 Comparison
To provide a clear understanding of the advancements in YOLOv10, it’s essential to compare it with its predecessor, YOLOv8. The following points highlight the major differences and improvements:
Architectural Efficiency:
- YOLOv8: Utilizes a C2f building block for effective feature extraction and fusion, enhancing performance but still relying on NMS for post-processing.
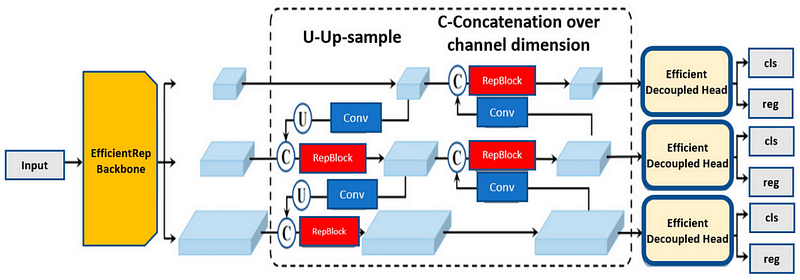
- YOLOv10: Implements a NMS-free architecture with consistent dual assignments, reducing the post-processing time significantly and improving overall latency. The lightweight classification head and other architectural optimizations reduce computational redundancy.
Inference and Latency:
- YOLOv8: Known for its fast inference speed, making it suitable for real-time applications. However, the reliance on NMS adds some latency.
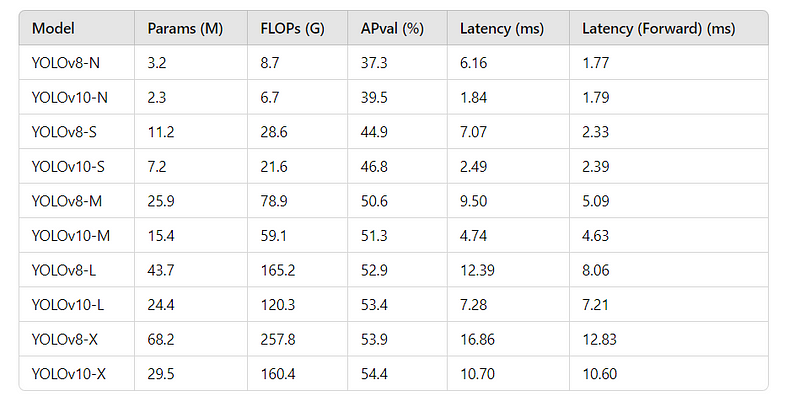
- YOLOv10: Achieves faster post-processing times due to its NMS-free design. Extensive experiments show YOLOv10-S is 1.8× faster than RT-DETR-R18 under similar AP on COCO, highlighting its superior efficiency.
Detection Performance:
- YOLOv8: Performs well across a variety of object detection tasks but can struggle with small objects, often requiring careful tuning of the confidence threshold.
- YOLOv10: Shows improved performance in detecting small objects, especially when using a lower confidence threshold. The consistent dual assignment strategy ensures more robust detection capabilities across various scenarios.
Parameter Utilization:
- YOLOv8: Although efficient, YOLOv8’s parameter utilization leaves some room for improvement.
- YOLOv10: Optimizes parameter usage more effectively, achieving higher performance with fewer parameters. For instance, YOLOv10-B has 46% less latency and 25% fewer parameters compared to YOLOv9-C for the same performance.
Key Takeaways
- Speed and Efficiency: YOLOv10 outperforms YOLOv8 in terms of post-processing speed due to its innovative NMS-free approach, making it highly suitable for real-time applications where latency is critical.
- Detection Accuracy: Both models perform well, but YOLOv10 shows a distinct advantage in handling small objects, especially when using a lower confidence threshold.
- Parameter Optimization: YOLOv10 leverages its parameters more efficiently, resulting in a model that is not only faster but also more compact compared to YOLOv8.
Conclusion
YOLOv10 represents a significant step forward in the evolution of real-time object detection models, offering substantial improvements in speed, efficiency, and detection accuracy over YOLOv8. By addressing the limitations of previous YOLO versions, particularly in post-processing and small object detection, YOLOv10 sets a new benchmark for real-time applications. For developers and researchers in computer vision, YOLOv10 offers a compelling choice for efficient and effective object detection.
YOLOV10 GITHUB / https://github.com/hamdiboukamcha/yolov10-tensorrt
HUGGINGFACE DEMO : https://huggingface.co/spaces/BoukamchaSmartVisions/Yolov10_V9_V8





