
Why Self-Driving Cars and How We Got Here
The Evolution from Horseless to Driverless — An Introduction to Self-Driving Cars (Part 1)

When my team and I first launched the Tesla Full Self-Driving beta release last year, I had never felt so close to our customers and the range of experiences they encountered when trying out our product for the first time. Working alongside engineers who cared and fought so hard for everyone’s safety, I could not help but imagine what the world would be like in 5 or 10 years from now when autonomous driving becomes the norm.
There will always be issues to fix and features to improve, but the indescribable thrill of having experienced the self-driving software firsthand might be well-compared to that when we first experienced how Google search and the ‘dot-com boom effect’ changed our ways of learning in late 1990s — for good. Or in 2015 when ride-hailing services like Uber revolutionized our mode of transportation, disrupting the taxi industry with the power of technology that effectively connects us as passengers to drivers or vice versa.
Our lives were forever changed because of these technological advances. Similarly, driverless cars would bring about one of the biggest societal and technological revolutions since the industrial revolution.
That mind-blowing experience was just the start of what eventually led me to further explore the fascinating world of embodied artificial intelligence and autonomous systems of self-driving cars. Before we dive deep into the technical aspects of self-driving cars in the next following articles of this Introduction to Self-Driving Cars series, lets first understand how we got here in the first place.
How did we get here?
As we look at the history of transportation, our human ancestors started to walk and run since 1 million years ago. Though it might sound like a no-brainer, such mode has allowed us to liberate our hands and transport goods (or even other human) from one place to another using our muscle power. We can now walk and text at the same time, maintaining the double pendulum with bent legs for stability.
Since ~4,000 years ago, we had used horse carriage to move people and goods. Humans ride some animals directly, use them for carrying goods, or harness them to pull wheeled vehicles.
The automobile did not come until 135 years ago in late 19th century, with prototypes invented by German men Karl Benz, Gottlieb Daimler, and Nicolaus Otto and a French engineer Emile Levassor.
The idea of self-driving vehicles dates back much further than Google’s research or Tesla’s beta releases in the present day. In fact, the concept of an autonomous car dates back to Futurama, an exhibit at the 1939 New York World’s Fair. General Motors created the exhibit to display its vision of what the world would look like in a couple of decades, and this vision included an automated highway system that would guide self-driving cars.
“The world we are now seeing is a vision, an artistic conception, which may undergo many changes as it develops into the great realities of tomorrow.” — Futurama: Highways and Horizons, 1939.
While a world filled with robotic vehicles isn’t yet a reality, the automotive industry has much progressed into 21st century with the emerging applications of internet of things (IoT) and computerized cars. Many cars today already have autonomous features like assisted parking and braking systems.
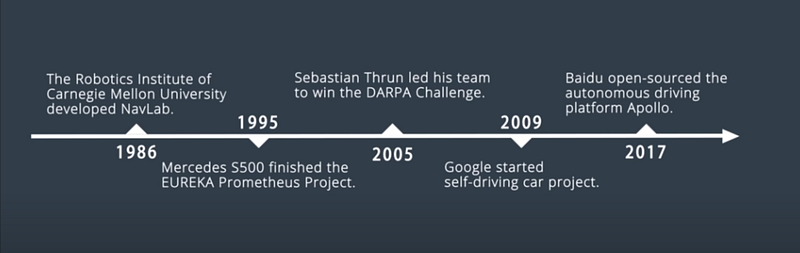
Research into self-driving cars began in 1980s, when the Robotics Institute of Carnegie Mellon University developed NavLab in 1986. In 2009, Google started its self-driving car project led by Sebastian Thrun. In 2015, the software enabling Autopilot, v7.0, was released as Tesla announced its goal to offer self-driving technology. In 2017, Baidu open-sourced the autonomous driving platform named Apollo.
Your car should drive itself. It’s amazing to me that we let humans drive cars… It’s a bug that cars were invented before computers. — Eric Schmidt
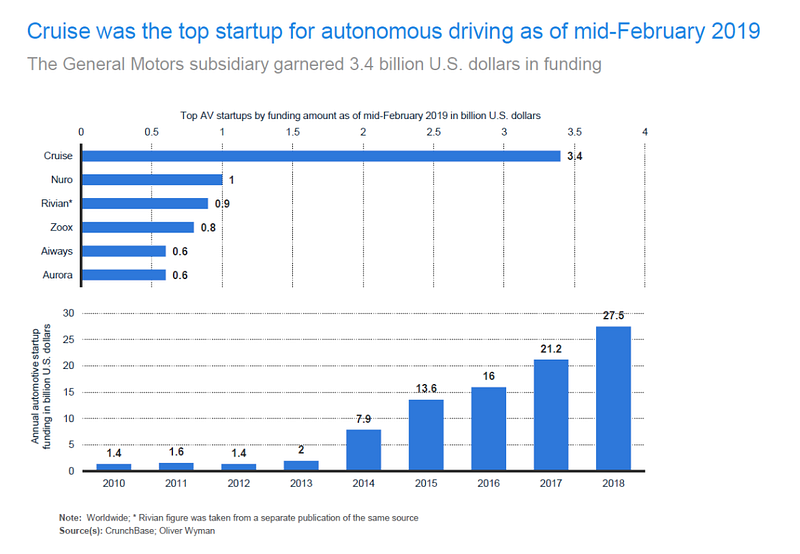
Today, the work on full-fledged autonomous vehicles continues, with the goal of making driving a car safer and simpler in the coming decades. The next 5 to 10 years will be the most pivotal moment of self-driving car developments. Among big players like Tesla and Waymo are also the following startups that are pushing the boundaries of embodied artificial intelligence and self-driving technologies.
According to a 2020 Statista report, we expect to see one in 10 cars to be fully automated by 2030 — bumping up the total contribution to the US economy to $13.7 billion. Robo-taxis will comprise a significant chunk of the market and are predicted to contribute roughly $1.2 trillion. I can see that in less than 5 years, we will already be able to get autonomous driving to developing countries, at least starting on highways.
Going driverless: How to get there?
Driver assistance technologies in today’s motor vehicles are already helping to save lives and prevent injuries, but they are not perfect. Safety, first and foremost, still remains a strong reason why we need to get there — to fully rely on driverless cars.
Each year, 1.35 million people are killed on roadways around the world.
A data from Centers for Disease Control and Prevention (CDC) shows that crash injuries are estimated to be the eighth leading cause of death globally for all age groups and the leading cause of death for children and young people 5–29 years of age. More people now die in crashes than from HIV/AIDS.
For this reason, we aim for the automotive technology to deliver even greater safety benefits and automated driving systems (ADS) that can handle the whole task of driving when we don’t want to or can’t do it ourselves — so we can minimize the number of crashes we have in the world today.
We want autonomous driving technology that helps us avoid drifting into adjacent lanes or making unsafe lane changes, or that warns us of other vehicles behind when we’re backing up, or that brakes automatically if a vehicle ahead stops or slows suddenly, among other things. These and other safety technologies use a combination of hardware (sensors, cameras, and radar) and software to help vehicles identify certain safety risks so they can warn the driver to act to avoid a crash.
The Society of Automotive Engineers define the levels of driving autonomy as follows, where current technologies in the industry are still struggling to get to Level 3 or Level 4 perfectly.
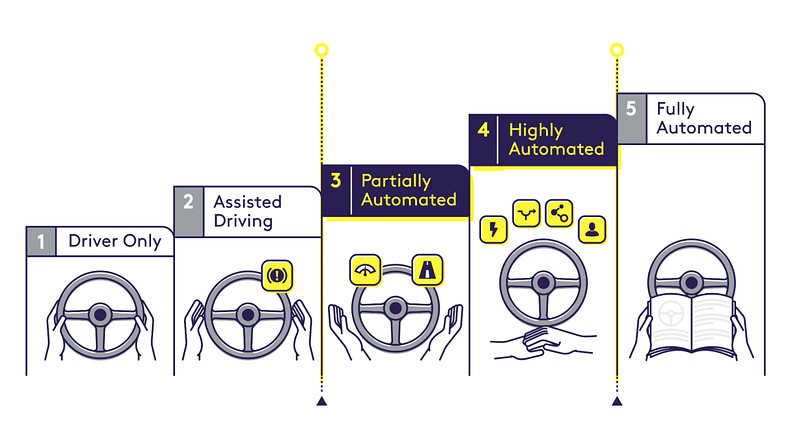
The 6 levels of vehicle autonomy
Most vehicles on the road today are still Level 0: manually controlled. The base level, L0, is when the driver is the sole decision maker, meaning that human provides the “dynamic driving task” although there may be systems in place to help the driver. An example would be the emergency braking system: since it technically doesn’t “drive” the vehicle, it does not qualify as automation.
Level 1: Driver Assistance is the lowest level of automation. The vehicle features a single automated system for driver assistance, such as steering or accelerating (cruise control). Adaptive cruise control, where the vehicle can be kept at a safe distance behind the next car, qualifies as an L1 because the human driver monitors the other aspects of driving such as steering and braking. A good way to remember is that L1 is typically only responsible for longitudinal control.
Level 2: Partial Automation includes auto cruise control or auto lane keeping. This means advanced driver assistance systems (ADAS). The vehicle can control both steering and accelerating/decelerating. Here the automation falls short of self-driving because a human sits in the driver’s seat and can take control of the car at any time. Tesla Autopilot running on hardware 2 and Cadillac (General Motors) Super Cruise systems both qualify for L2, where the system is responsible for both lateral and longitudinal control.
The jump from Level 2 to Level 3 is substantial from a technological perspective, but subtle if not negligible from a human perspective. Level 3: Conditional Automation has “environmental detection” capabilities and can make informed decisions for the cars, such as accelerating past a slow-moving vehicle, but they still require human override. The 2019 Audi A8L is an example of L3 functionality, where it features Traffic Jam Pilot, which combines a lidar scanner with advanced sensor fusion and processing power (plus built-in redundancies should a component fail).
Level 4: No Human Interference can operate in self-driving mode, meaning without steering wheel, throttle or brake. A key difference between L3 and L4 automation is that L4 intervenes if things go wrong or there is a system failure. In this sense, these cars do not require human interaction in most circumstances. However, a human still has the option to manually override.
Examples of L4 in existence are geared towards ride-sharing, where vehicles can be used within a limited area typically below 30mph speed limit. This is known as geofence restriction. Waymo recently unveiled an L4 taxi service in Arizona, where they had been testing driverless cars―without a safety driver in the seat―for more than a year and over 10 million miles.
Level 5: Full Automation is expected to be as good or better than human driver. Since it does not require human attention, L5 cars won’t even have steering wheels or acceleration/braking pedals. They will be free from geofencing, able to go anywhere and do anything that an experienced human driver can do! One thing though, these fully autonomous cars are not available to the general public yet, as of now.

Concluding thoughts
With more reliable driving capabilities, driverless cars offer convenience and quality-of-life improvements that are limitless.
Imagine a world where you could commute daily without you or others having to drive, where you could spend the time in the car eating or finishing up your presentation. Where the elderly and the physically disabled have more freedom to mobilize — also in a much greener world with less CO2 emissions.
A recent study identified three trends that, if adopted concurrently, would unleash the full potential of autonomous cars: vehicle automation, vehicle electrification, and ride-sharing. By 2050, these “three revolutions in urban transportation” could:
- Reduce traffic congestion (30% fewer vehicles on the road)
- Cut transportation costs by 40% (in terms of vehicles, fuel, and infrastructure)
- Improve walkability and livability
- Free up parking lots for other uses (schools, parks, community centers)
- Reduce urban CO2 emissions by 80% worldwide
That day is coming, but we first need to get over a few speed bumps to get to Level 5 of Full Driving Automation. I hope from this read you get to learn more about the origin of autonomous cars and how we can get there. More importantly, to get excited about how the autonomy of driverless vehicles would help revolutionize how we live in the near future!
More Resources
About the author:




{kind=link}