
Types of Convolutional Neural Networks: LeNet, AlexNet, VGG-16 Net, ResNet and Inception Net
We would be seeing different kinds of Convolutional Neural Networks and how they differ from each other in this article. These are some groundbreaking CNN architectures that were proposed to achieve a better accuracy and to reduce the computational cost .
1. LeNet-5
This is also known as the Classic Neural Network that was designed by Yann LeCun, Leon Bottou, Yosuha Bengio and Patrick Haffner for handwritten and machine-printed character recognition in 1990’s which they called LeNet-5. The architecture was designed to identify handwritten digits in the MNIST data-set. The architecture is pretty straightforward and simple to understand. The input images were gray scale with dimension of 32*32*1 followed by two pairs of Convolution layer with stride 2 and Average pooling layer with stride 1. Finally, fully connected layers with Softmax activation in the output layer. Traditionally, this network had 60,000 parameters in total. Refer to the original paper.

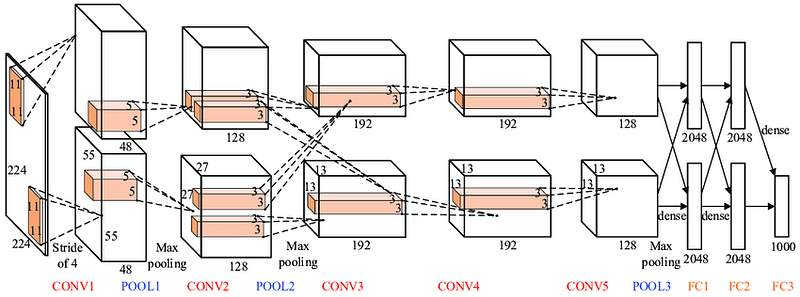
2. AlexNet
This network was very similar to LeNet-5 but was deeper with 8 layers, with more filters, stacked convolutional layers, max pooling, dropout, data augmentation, ReLU and SGD. AlexNet was the winner of the ImageNet ILSVRC-2012 competition, designed by Alex Krizhevsky, Ilya Sutskever and Geoffery E. Hinton. It was trained on two Nvidia Geforce GTX 580 GPUs, therefore, the network was split into two pipelines. AlexNet has 5 Convolution layers and 3 fully connected layers. AlexNet consists of approximately 60 M parameters. A major drawback of this network was that it comprises of too many hyper-parameters. A new concept of Local Response Normalization was also introduced in the paper. Refer to the original paper.
3. VGG-16 Net
The major shortcoming of too many hyper-parameters of AlexNet was solved by VGG Net by replacing large kernel-sized filters (11 and 5 in the first and second convolution layer, respectively) with multiple 3×3 kernel-sized filters one after another. The architecture developed by Simonyan and Zisserman was the 1st runner up of the Visual Recognition Challenge of 2014. The architecture consist of 3*3 Convolutional filters, 2*2 Max Pooling layer with a stride of 1, keeping the padding same to preserve the dimension. In total, there are 16 layers in the network where the input image is RGB format with dimension of 224*224*3, followed by 5 pairs of Convolution(filters: 64, 128, 256,512,512) and Max Pooling. The output of these layers is fed into three fully connected layers and a softmax function in the output layer. In total there are 138 Million parameters in VGG Net.

Drawbacks of VGG Net: 1. Long training time 2. Heavy model 3. Computationally expensive 4. Vanishing/exploding gradient problem
4. ResNet
ResNet, the winner of ILSVRC-2015 competition are deep networks of over 100 layers. Residual networks are similar to VGG nets however with a sequential approach they also use “Skip connections” and “batch normalization” that helps to train deep layers without hampering the performance. After VGG Nets, as CNNs were going deep, it was becoming hard to train them because of vanishing gradients problem that makes the derivate infinitely small. Therefore, the overall performance saturates or even degrades. The idea of skips connection came from highway network where gated shortcut connections were used.
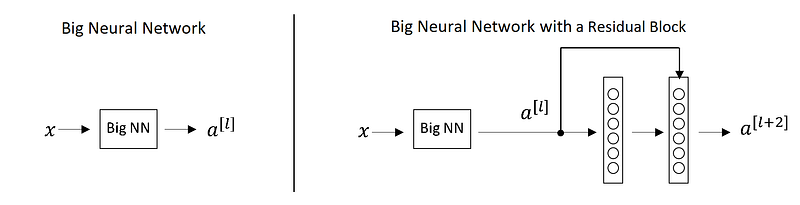
For the above figure for network with skip connection, a[l+2]=g(w[l+2]a[l+1]+ a[l])
Lets say for some reason, due to weight decay w[l+2] becomes 0, therefore, a[l+2]=g(a[l])
Hence, the layer that is introduced doesnot hurt the performance of the neural network. This the reason, increasing layers doesn’t decrease the training accuracy as some layers may make the result worse. The concept of skip connections can also be seen in LSTMs.
5. Inception Net
Inception network also known as GoogleLe Net was proposed by developers at google in “Going Deeper with Convolutions” in 2014. The motivation of InceptionNet comes from the presence of sparse features Salient parts in the image that can have a large variation in size. Due to this, the selection of right kernel size becomes extremely difficult as big kernels are selected for global features and small kernels when the features are locally located. The InceptionNets resolves this by stacking multiple kernels at the same level. Typically it uses 5*5, 3*3 and 1*1 filters in one go. For better understanding refer to the image below:
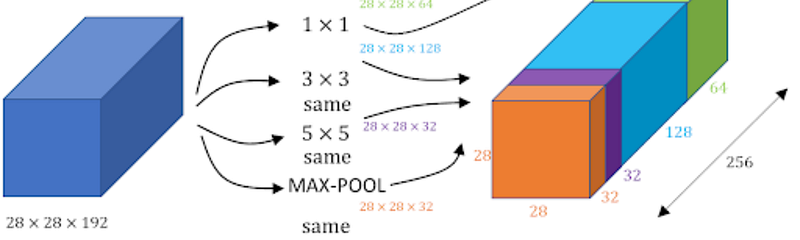
Note: Same padding is used to preserve the dimension of the image.
As we can see in the image, three different filters are applied in the same level and the output is combined and fed to the next layer. The combination increases the overall number of channels in the output. The problem with this structure was the number of parameter (120M approx.) that increases the computational cost. Therefore, 1*1 filters were used before feeding the image directly to these filters that act as a bottleneck and reduces the number of channels. Using 1*1 filters, the parameter were reduced to 1/10 of the actual. GoogLeNet has 9 such inception modules stacked linearly. It is 22 layers deep (27, including the pooling layers). It uses global average pooling at the end of the last inception module. Inception v2 and v3 were also mentioned in the same paper that further increased the accuracy and decreasing computational cost.
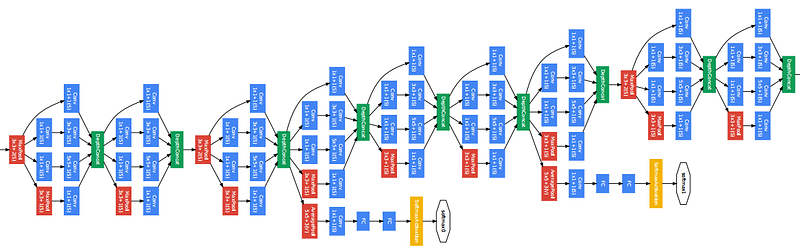
Side branches can be seen in the network which predicts output in order to check the shallow network performance at lower levels.





