
Rotated/Oriented Object Detection
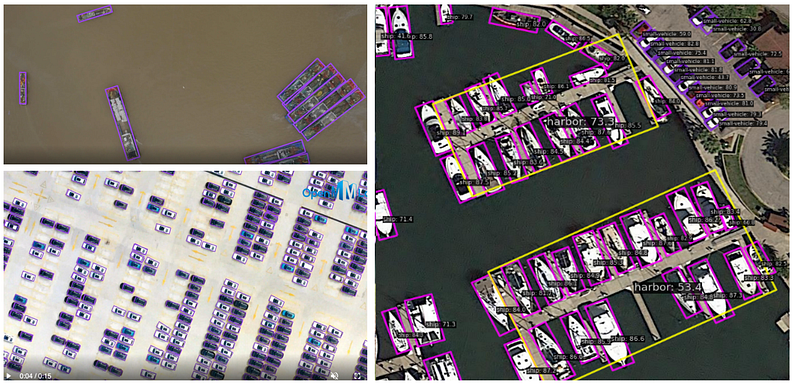
Up-right bounding boxes include large portion of background. Rotated bounding boxes can be used to localise target objects more accurate. To be more precise, then instance segmentation framework can be considered. However, pixel-wise prediction (segmentation) frameworks are often much slower. Rotated/Oriented bounding box then used to locate the objects.
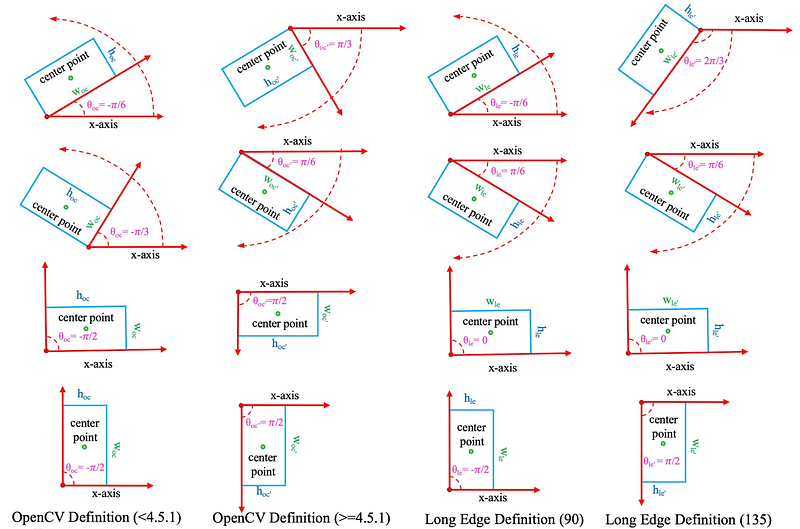
Apart from (x,y,w,h), a orientation theta is also regressed to rotate the upright bounding box. There are different way to define the orientation, e.g. OpenCV (oc), Long Edge 90 (le90), Long Edge 135 (le135).
Rotate Feature
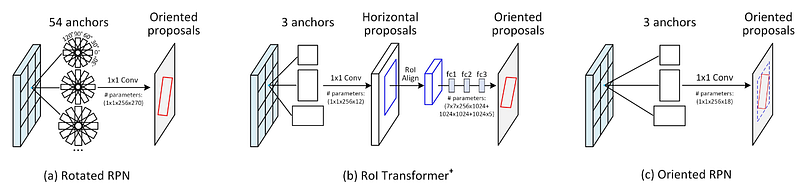
With existing upright bounding box detection frame work, e.g. RetinaNet, FCOS, RepPoint, it is possible to detect rotated bbox by adding theta. However, the feature representation for classification and regression is not suitable for the rotated objects.
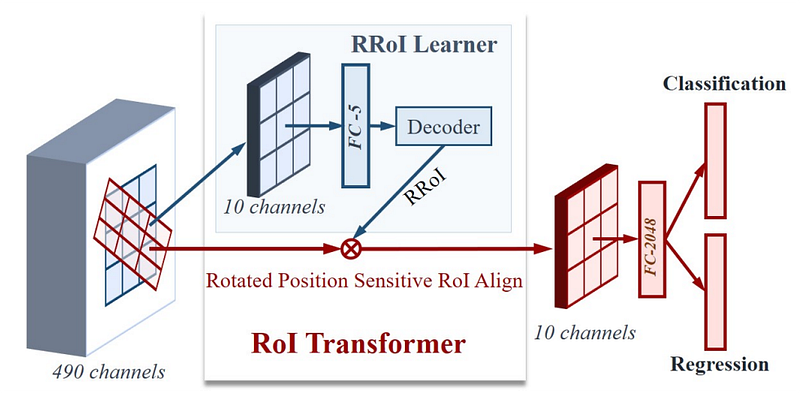
[2,3,4] proposed to rotated/transform feature representation to improve classification and localisation performance. ROI Trans[2] propose to learn rotation parameters for upright RoIs, and apply spatial transformations on RoI feature before feed to classification and regression head.
Oriented RCNN proposed to directly find rotated anchors with learned parameters.
Gassian Based Loss
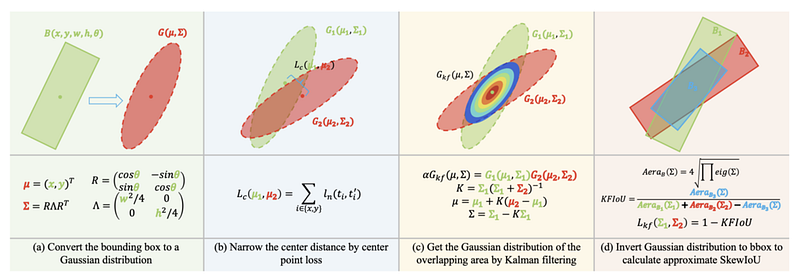
Instead of use rotated bbox to calculate overlapping loss, [6,7,8] proposed to convert the rotated bounding box into a 2-D Gaussian distribution. [6] calculate the Kullback-Leibler Divergence (KLD) between the Gaussian distributions as the regression loss. Impressive improvement on multiple dataset and frameworks.
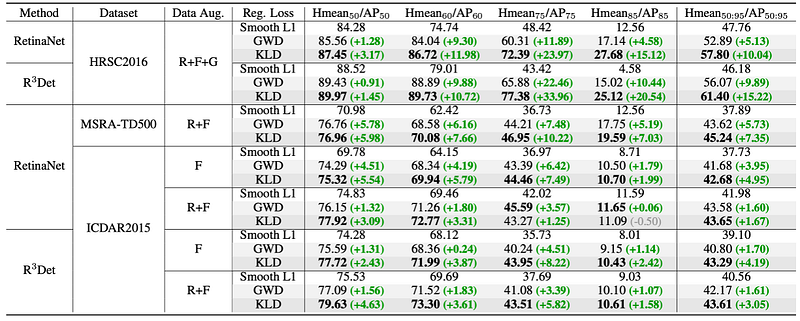
KFIOU[8] propose to use Kalman Filter to obtain the overlapping area between prediction and groundtruth, which is currently the state-of-the-art.
Positive Sample Selection
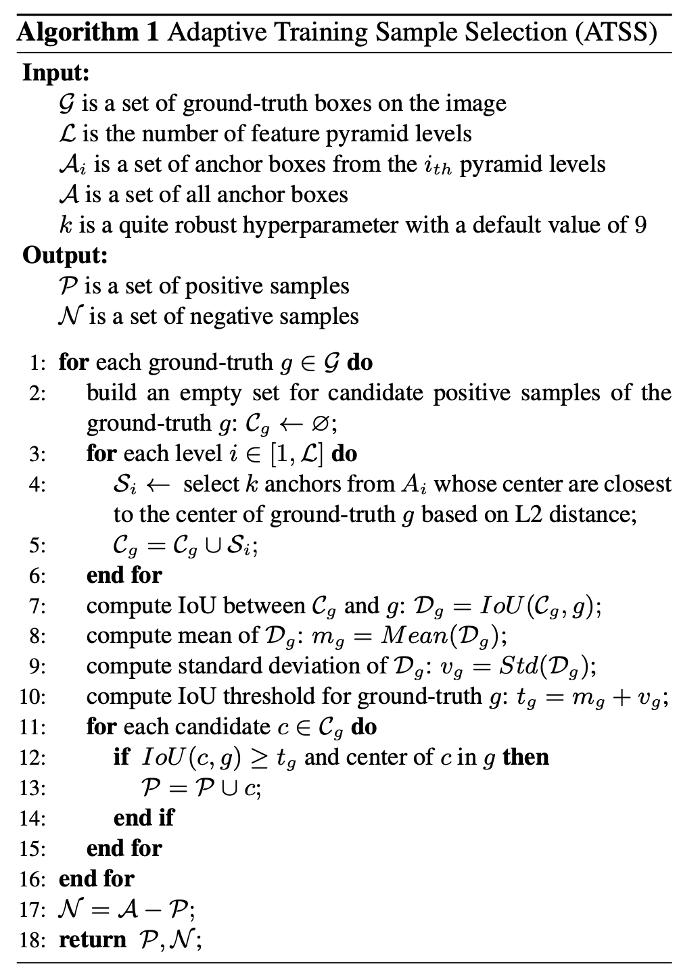
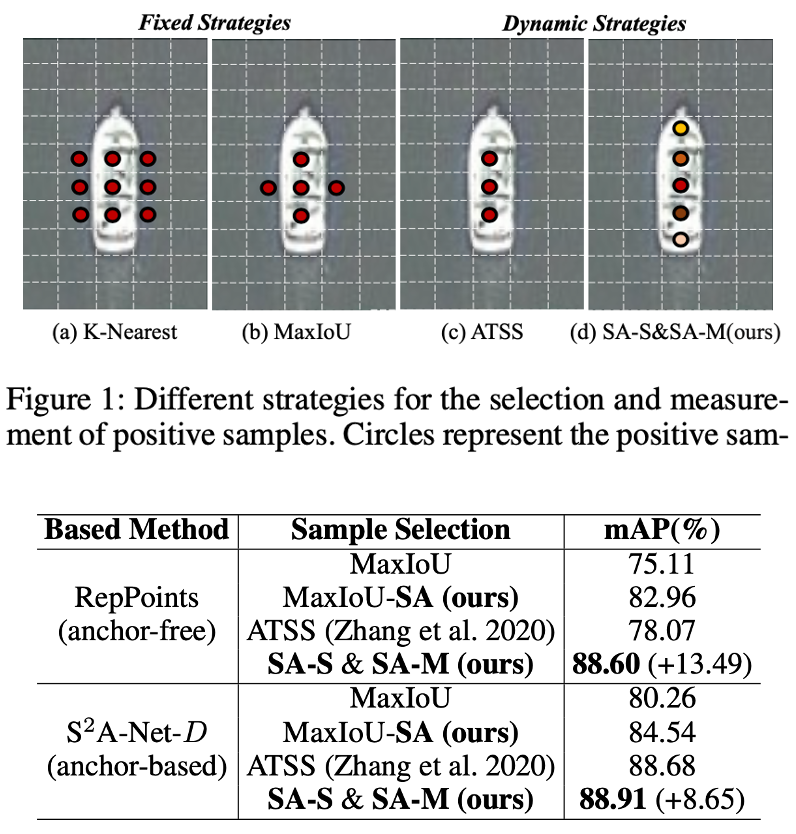
The selection of positive samples lead to performance gap between anchor based and anchor free methods. ATSS[9] propose an Adaptive Training Sample Selection (ATSS) to automatically select positive and negative samples according to statistical characteristics of object.
SASM[10] propose novel flexible shape-adaptive selection (SA-S) and shape-adaptive measurement (SA-M) strategies for oriented object detection, which comprise an SA-S strategy for sample selection and SA-M strategy for the quality estimation of positive samples.
Others
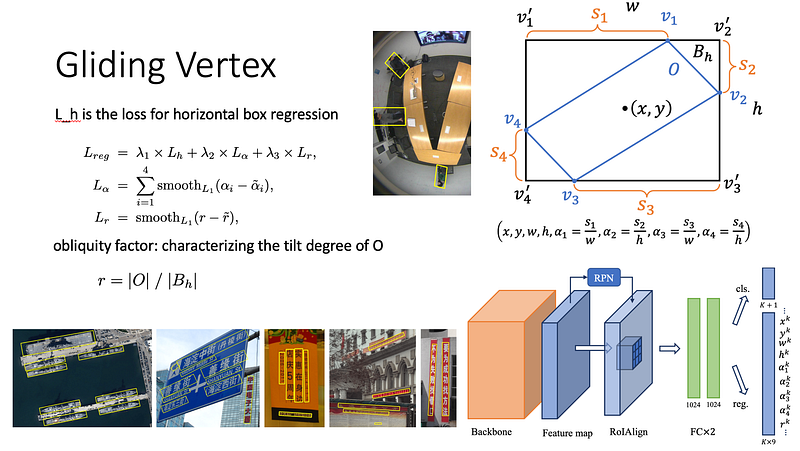
Gliding Vertex [11] proposed to estimate the vertex gliding distance on four upright bbox boundaries. Apart from the rigid objects, e.g. ships, textures, pedestrian datasets are also used for testing.
- https://github.com/open-mmlab/mmrotate
- Ding, Jian, et al. “Learning roi transformer for oriented object detection in aerial images.” Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2019.
- Han, Jiaming, et al. “Align deep features for oriented object detection.” IEEE Transactions on Geoscience and Remote Sensing 60 (2021): 1–11.
- Han, Jiaming, et al. “Redet: A rotation-equivariant detector for aerial object detection.” Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2021.
- Xie, Xingxing, et al. “Oriented R-CNN for object detection.” Proceedings of the IEEE/CVF International Conference on Computer Vision. 2021.
- Yang, Xue, et al. “Learning high-precision bounding box for rotated object detection via kullback-leibler divergence.” Advances in Neural Information Processing Systems 34 (2021): 18381–18394.
- Yang, Xue, et al. “Rethinking rotated object detection with gaussian wasserstein distance loss.” International Conference on Machine Learning. PMLR, 2021.
- Yang, Xue, et al. “Rethinking rotated object detection wsith gaussian wasserstein distance loss.” International Conference on Machine Learning. PMLR, 2021.
- Zhang, Shifeng, et al. “Bridging the gap between anchor-based and anchor-free detection via adaptive training sample selection.” Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. 2020.
- Hou, Liping, et al. “Shape-adaptive selection and measurement for oriented object detection.” Proceedings of the AAAI Conference on Artificial Intelligence. Vol. 36. №1. 2022.
- Xu, Yongchao, et al. “Gliding vertex on the horizontal bounding box for multi-oriented object detection.” IEEE transactions on pattern analysis and machine intelligence 43.4 (2020): 1452–1459.





