
Marine Wall Climbing Robots
With the development of science and technology, economy, and military, the Marine wall-climbing robot which replaces manual operation is constantly updated. Various kinds of ship wall climbing robots are introduced through adsorption, movement, and drive

Introduction
In recent years, with the rapid development of economic globalization, international maritime disputes still exist, and the number of ships has increased. However, after a long period of driving and berthing, the hull surface will be covered with marine life such as barnacles and algae.
Some studies have shown that when a ship with marine organisms is sailing, its speed will drop by more than 10%, and its fuel consumption will increase by 40%, causing serious economic losses and reducing safety.
For this reason, countries and research institutions continue to follow up and innovate to replace manual ship climbing robots that are constantly updated and iterative.
Various types of ship climbing robots such as different adsorption methods, different movement methods, and different driving methods have been developed.
Mainly used in large commercial ships and military ships, etc., through its adsorption mechanism, adsorption on the surface of the hull, and driven by the drive mechanism, the hull surface is cleaned, polished, and trusted by the moving mechanism.
Wall-climbing robots can be roughly divided into three categories:
The adsorption mode
The bionic foot mode
The Drive mode
Their respective characteristics as follows:
The adsorption methods are divided into magnetic adsorption (including a permanent magnet and electromagnetic adsorption), negative pressure adsorption (including vacuum adsorption, etc.), bionic foot adsorption (including climbing adsorption, dry adhesion, vibration adsorption), thrust adsorption (including rotor Adsorption) and so on.
Magnetic adsorption has a large adsorption force, but the wall surface is required to be made of magnetic material, and the energy consumption is high. The negative pressure adsorption has a wide range of applications. However, to ensure the sealing performance, the smoothness of the wall is very high.

The bionic foot adsorption method is relatively new. The adsorption method has broad application prospects, but there is still a gap in practical application. The thrust adsorption does not require a high wall surface, but the cost is high.
There are crawler type, wheel type, and foot type for movement. The crawler-type mobile mechanism has a large ground area and strong load capacity, but it is large in size and mass, and it is difficult to control steering.
The wheel type moving mechanism moves fast, but its requirements for the flatness of the wall surface area higher than that of the crawler type
The most prominent advantage of the foot-type machine moving mechanism is, the stronger it can adapt to more complicated wall conditions, but the disadvantage is that it is the most difficult to control.
The driving mode is divided into the electric drive, hydraulic drive, pneumatic drive, etc.
The electric drive does not require energy conversion and directly provides electrical energy to the robot mechanisms, saving space, high efficiency, fast speed adjustment, and wide application. However, the adsorption force produced by it is limited. If a large adsorption force is to be obtained, the cost must be increased.
The hydraulic drive converts the mechanical energy into the pressure energy of the liquid through the hydraulic pump, and converts the pressure energy of the liquid into the mechanical energy through the hydraulic actuator, and then drives the various mechanisms of the robot.
Therefore, it can provide a larger thrust and make the adsorption mechanism have a larger Adsorption, but the viscosity of the oil in the hydraulic drive mechanism will become thicker due to the decrease in temperature, reducing work efficiency.
Since the oil needs to be leak-proof, a corresponding leak-proof device will be required, which will increase the size of the robot and increase work efficiency.
At a discount, the hydraulic drive is rarely used in wall-climbing robots. A pneumatic drive is similar to a hydraulic drive. The working medium is changed to gas.
The air source is convenient and can be discharged directly after use. It is pollution-free. The air viscosity is small. The friction of the gas in the transmission is small. Therefore, centralized air supply and long-distance transportation can be used. Poor working stability and exhaust noise.
Research status at home and abroad
From the perspective of adsorption methods, the development of marine wall-climbing robots originated from the negative pressure adsorption in Japan.
Later, thrust adsorption, magnetic adsorption, and bionic foot adsorption have emerged one after another. Although magnetic adsorption is later than negative pressure adsorption, Its adsorption force is strong, the control is relatively simple, and it is currently the most widely used, among which permanent magnet adsorption is the most widely used.
Negative pressure adsorption type wall climbing robot
The world’s first wall robot prototype adopted negative pressure adsorption. It was developed by Lecturer Xiliang of Osaka Prefecture University in Japan in 1966.
The ducted fan sucked the air in the suction cup to achieve the purpose of negative pressure adsorption. It was again in 1975, in 1982 and again in 1982, wheeled and walking-footed negative pressure wall robots were developed.
With the development of negative pressure technology, in China, the FESTO laboratory of Chongqing University developed FFROBOT-III in 2018, compared with the previous FFROBOT-I and FFROBOT-II, it adopts vacuum multi-suction suction.
Its moving platform is changed from an H-type parallel mechanism to a cross-type mechanism, and the horizontal and vertical directions are driven by their respective motors.
The independent control does not affect each other, and there is no synchronization problem of the motor
At the same time, the cross-shaped mobile platform improves the moving space. While the step distance is slightly increased, the frame size is greatly reduced, effectively reducing the frame's self-respect.
The leg adopts a symmetrical parallel structure, and the pneumatic tendon is placed between the two parallel legs so that the contraction plane of the pneumatic tendon is on the same plane as the quadrilateral leg raising plane to avoid lateral torque when the leg is raised, and greatly enhance the stiffness and stiffness of the leg. strength.
Due to the foot-type movement method, the robot has a good obstacle crossing ability, but the suction cup has poor adaptability to the wall. In the case of an uneven wall surface, the suction cup is difficult to be completely closed, which will weaken the adsorption force and cause the robot to detach the risk of the wall.
Thrust adsorption wall climbing robot
Thrust adsorption is positive pressure adsorption. Generally, there are two high-speed propellers on the wall of the robot body, one is used to generate upward thrust, the other is used to generate thrust in the direction of the vertical wall so that it is close to the wall and has the ability to overcome obstacles.
Strong, low requirements on the wall, but due to the influence of external wind, it takes up a large space for the wall-climbing robot, which limits the form of work
In 1995, Lecturer Xi Liang from Osaka Prefecture University in Japan took the lead in researching such a thrust-adsorbing wall robot. After that, in 2013, Seoul University in South Korea developed ROPE RIDE.
The crawler moving method is adopted, and the climbing speed can reach 15m/min under the condition of a load of 20 kg. Domestic research on thrust-adsorption wall-climbing robots is relatively late, but it has developed rapidly in recent years.
Yang Mei Qiang of the Beijing Institute of Petrochemical Technology developed an underwater thrust-adsorption wall-climbing robot prototype in 2015, which is mainly used for underwater structures. Perform observation and testing.

Crawler type permanent magnet adsorption wall climbing robot
Compared with electromagnetic adsorption, the control of permanent magnet adsorption is simpler. In the early days, research institutions generally adopted permanent magnet adsorption.
With continuous development, the study of electromagnetic adsorption gradually began
The Magnetic Crawler in Canada has developed a crawler-type magnetic adsorption wall robot. Permanent magnets are embedded on the crawlers on both sides of the robot, which is the strongest adsorption method for magnetic adsorption wall robots.
It can safely be adsorbed on the wall for movement in an underwater environment of 30 m
The crawler movement has strong adsorption capacity, but Poor flexibility and difficult steering. Nowadays, crawler-type permanent magnetic adsorption wall-climbing robots can carry a variety of components for operation.
In 2018, Olivier Kermorgant of the Central Scientific Laboratory of Nantes France, developed a magnetic climbing robot for autonomous welding in the shipbuilding industry for welding tasks, with the control algorithm for the robot to weld along a straight line, the main sensor of the robot is a two-dimensional laser scanner, which provides information on the surface of the hull and is used to perform multiple tasks.
It can carry a payload of 100 kg (including its own weight).
The permanent magnet of the above wall-climbing robot itself cannot adjust the magnetic force. According to the nature of the permanent magnet, if the distance between the permanent magnet and the wall surface is changed, the magnetic force can be changed, thereby achieving technological progress.
Chen Jin of Jiangsu University of Science and Technology 2019 studied a permanent magnet adjustable adsorption multi-track omnidirectional mobile wall-climbing robot for ships.
The robot monitors the inclination angle on the ferromagnetic wall through its own gyroscope and transmits the inclination angle signal to the control system to control the ball screw to expand and contract the Halbach square array permanent magnet adsorption unit to increase or decrease the permanent magnet and the ship in real-time.
The adsorption distance of the outer wall surface to obtain a suitable adsorption force. This realizes that the permanent magnetic force can also be adjusted, which is a major technological breakthrough for the permanent magnet adsorption to achieve variable magnetic force adjustment.
Wheeled permanent magnet adsorption wall climbing robot
Crawler-type wall-climbing robots mainly have problems such as poor steering performance and inflexible motion.
In addition to crawler-type, there are wheel-type wall-climbing robots. The biggest advantage brought by wheel-type is flexible movement and improved travel speed, while wheel-type permanent magnet Adsorption wall-climbing robots can be divided into two types:
One is to directly use the magnetic wheel, the permanent magnet is directly installed on the surface of the wheel, and the magnetic wheel acts as both a moving mechanism and an adsorption mechanism.

The CHINESE Luoyang Shengrui Intelligent Company mainly develops magnetic adsorption wall-climbing robots, and its rust removal robots, the wall robot is mainly used to remove rust on the surface of large ships.
Compared with the previous high-pressure water flow rust removal, it adds a shot blasting or sand machine to remove rust. Considering the small magnetic attraction of the magnetic wheel, the rope suspension is adopted.
The way of hoisting balances its gravity, prevents it from sliding down and detaching, and ensures the safety of operation.

The second is that the wheels have no adsorption force. They are only used as a moving mechanism. The adsorption mechanism still uses permanent magnets.
The permanent magnets are installed on the bottom of the car body between the two wheels at a certain distance from the wall.
This kind of robot movement is very flexible, but it brings about a weak anti-overturning ability

The RJE-1000 ship cleaning robot developed by COMBIJET of Cyprus, the Mediterranean island country, the total weight of the robot is only 54 kg, and the traveling speed is 5–20m/min. It adopts the permanent magnet gap adsorption method.
The permanent magnet is placed in the middle of a pair of driving wheels, and the drive belt is used for transmission. The problem of iron scraps sticking to permanent magnets, but also easily leads to excessive permanent magnet gaps, which greatly reduces the reliability of the adsorption mechanism.
In China, The China Shipbuilding Industry Corporation (CSIC) 716 succeeded in the automated laser derusting and paint removal test of Wuchang Shipbuilding Company provides a mature product for the domestic ship coating robot system, which provides a guarantee for the development of ship intelligent manufacturing.

The adsorption method adopts permanent magnetic gap adsorption, which is relatively simple for the permanent magnetic track adsorption method.
This adsorption method makes the entire robot structure simpler and greatly reduces the weight of the body
Besides, the rust removal robot developed by the team of Professor Zhu Shiqiang from the Institute of Marine Electronics and Intelligent Systems of the Ocean School of Zhejiang University in 2018, the MW-SR-01 swing arm ship rust removal robot developed by Beijing Shihe Technology Co Ltd in 2017.
Electromagnetic adsorption type wall climbing robot
The magnetic force of permanent magnet adsorption cannot be adjusted by itself so that the adsorption force of the wall-climbing robot is single, the work form is single, the adsorption force is the same when flattening the wall and when crossing obstacles, and the magnetic force cannot be reasonably distributed according to the needs.
Electromagnetic adsorption was introduced, which was initially applied to foot-type wall-climbing robots. With the maturity of electromagnetic technology, it is gradually applied to crawler-type wall-climbing robots, breaking through the permanent magnet-led magnetic adsorption wall-climbing robot technology field.
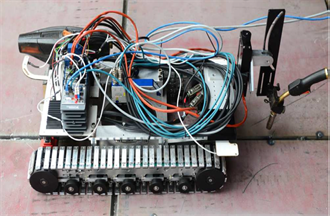
In China, the Naval University of Engineering developed the first domestic marine wall-climbing robot based on precise control of electromagnetic adsorption in 2019, such as shown in the figure.
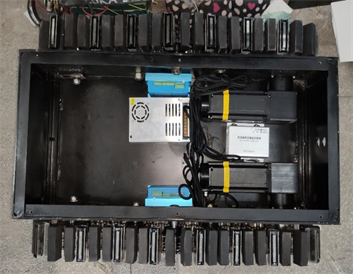
The electromagnets are installed on the crawlers on both sides of the body, and each adsorption unit is individually controlled, and then each adsorption unit is controlled by the master controller to accurately control the magnitude of the magnetic force, making it suitable for a variety of working methods.
When crossing obstacles, it can provide a larger adsorption force than that required for a flat wall, which greatly improves the safety of its operation
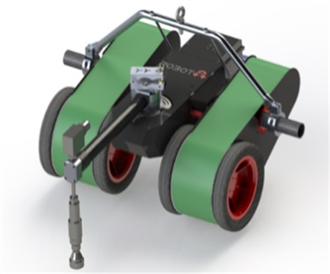
However, since each adsorption unit needs to be controlled separately, it also increases the difficulty of control. Hong Xiaowei and Chen Yong from the School of Mechatronic Engineering of Nanjing Forestry University also developed a new type of electromagnetic adsorption wall climbing robot in 2020, such as shown in the figure below, it can be used for large-scale steel structure wall inspection operations.

It can realize the unity of robot mobility and adsorption through the cycle power of the electromagnetic adsorption unit. The total weight is 6.7 kg and the maximum moving speed can reach 5 cm/sec.
It can carry a payload of 3 kg.
Bionic foot climbing robot
This type of wall-climbing robot has a small load capacity and is generally seldom used for ship surface rust removal and other operations.
It is mostly used for inspection operations
In recent years, it has flourished and has been studied by many research institutions. With the development of 3D printing technology, in 2017.
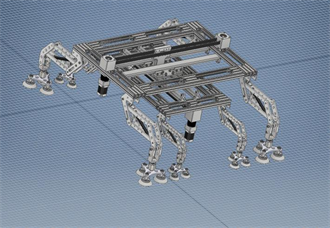
The researchers at the Ulsan National Institute of Science and Technology (UNIST) in South Korea used 3D printing technology to develop the imitation gecko robot UNIclimb, such as shown in the figure, the body is connected with four legs.
The tails of the legs are four soles with adhesive pads. Servo motors are installed between the body and the legs, and between the legs and the soles.
The robot is driven by these motors and passes through a triangular gait. Stable adhesion movement is achieved on the negative surface, and the 3D printing technology used at a moving speed of 1 mm/s has advantages and disadvantages.
The positive side is that the SiO 2 -F nanoparticles covered on the surface bring waterproof performance.
The disadvantage is that its structural strength is low, the load capacity is not strong, and the requirements for the working environment are relatively high.
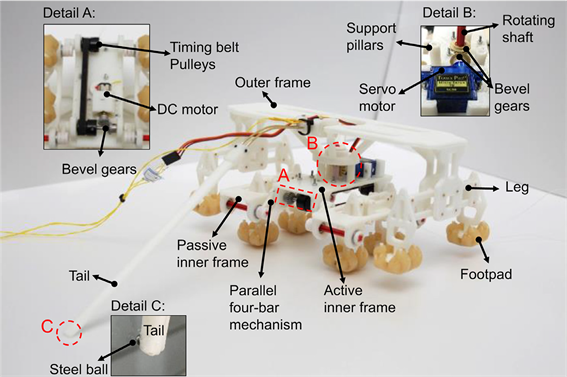
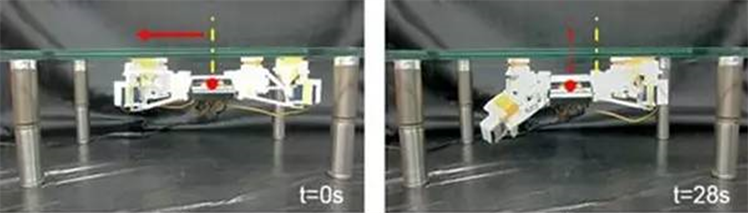
Besides, South Korea’s Lingnan University and Hanyang University have jointly developed a steerable dry glue linkage wall-climbing robot, the dry adhesion method is combined with the flat elastic body, and a parallel four-bar mechanism connecting the active inner frame and the passive inner frame is designed.
The parallel four-bar mechanism rotates to achieve walking motion, which can be performed in a vertical plane.
The mobile operator has a moving speed of 13.3 m/s, which is greatly improved compared to UNIclimb, but its walking motion and steering motion have coupling problems.
Technical difficulties of marine wall-climbing robots
From the above discussion, it can be seen that the research of wall-climbing robots has made great progress with the advancement of science and technology, but the limitations of the existing technology make its practical application not extensive.
There are still technical difficulties waiting for breakthroughs in the following three aspects.
1.Adsorption method
Marine wall-climbing robots generally work on vertical walls or wall surfaces at a certain angle to the ground. This requires the adsorption mechanism to provide sufficient adsorption force so that the wall-climbing robot can safely be adsorbed on the wall and can also perform operations normally.
The above discussion shows that the current adsorption methods have their own advantages and disadvantages, and none of them can meet the requirements of wide application in engineering
Magnetic adsorption requires the wall surface to be magnetic, and negative pressure adsorption requires that the wall surface cannot have large protrusions or grooves.
Try not to leak air as much as possible, and the adsorption force that the bionic foot adsorption can provide is very small, can not carry heavy equipment, has limited load capacity, and cannot complete large-scale operations such as rust removal.
2.How to move
When the marine wall-climbing robot works on the wall, the movement mode determines the operating efficiency to a certain extent, and the hull wall generally has bumps and grooves, etc.
Which are not smooth, which requires the marine wall-climbing robot to have certain obstacles ability
Among the three modes of movement, the foot-style has the strongest obstacle-climbing ability. When encountering obstacles, the foot-style robot will control each of its legs to cross the obstacles one by one, and then cross the obstacles as a whole.
But this is at the expense of moving speed For the price. Compared with the foot type, crawler type and wheeled robots move faster but have poorer obstacle crossing ability.
This causes the problem of inconsistent movement speed and obstacle crossing ability, that is, the coupling problem between the movement mode and the adsorption mode.
3.Drive method
At present, in actual projects, electric drives are mostly used. To ensure that the marine wall-climbing robot can operate stably, it is generally powered by a wired method, plus the delivery pipe required by the operating mechanism, which is also a considerable part of the weight, and the wired is not convenient.
Robot operation is prone to entanglement, etc., and may even cause dangers such as the robot falling
Of course, there are also wireless power supplies. The robot itself can be equipped with batteries, including nickel-hydrogen batteries, lithium batteries, fuel cells, etc., or miniature internal combustion engines, but this will increase the weight of the robot itself and have higher requirements for its adsorption capacity.
For ships, the wall area is large, and the power supply carried by the wall-climbing robot itself may have insufficient functions.
The future development trend of marine wall-climbing robots
First of all, adsorption technology is a key technical issue of marine wall-climbing robots, which determines the reliability and stability of its operation.
After appeals and discussions, many adsorption technologies still have shortcomings in the process of engineering application. Research institutions at home and abroad a lot of energy has been invested in this.
Although this technical problem has not been completely solved, many scientific research results have been achieved. With the continuous advancement of polymer materials, materials similar to gecko toes will be developed.
Through the physical improvement and precision processing, future bionic foot-climbing robots will have a greater load capacity. With the discovery of new materials, As well as the development of bionic technology and control technology, the key issue of adsorption technology will also be solved.

Secondly, for wired energy supply, wireless energy supply will be vigorously developed in the future. With the domestic emphasis on new energy technology, the future battery energy density will increase, the battery will be small, and the battery life will be long, making the robot itself lighter and wider.
Space where the robot runs and the work area is wider and the wired-powered marine wall-climbing robot is promoted to develop toward a wireless work plan.
Miniaturization, lightweight, wireless power supply, and wireless control will be the future development direction.
Conclusion
As a marine wall-climbing robot that replaces manual operations, its practical engineering application has not been vigorously promoted, and the operation content is limited, mainly cleaning, spraying, testing, and rust removal.
The coupling problem between the movement mode and the adsorption mode will be solved.
With the development of sensing technology and artificial intelligence, it will bring independent decision-making ability to the wall-climbing robot. The control is simple and convenient, intelligent, and the work is stable.
Wall robots are widely used in practical engineering to promote the development of the wall-climbing robot industry.





