Four dimensional geometry — the art of polynomials
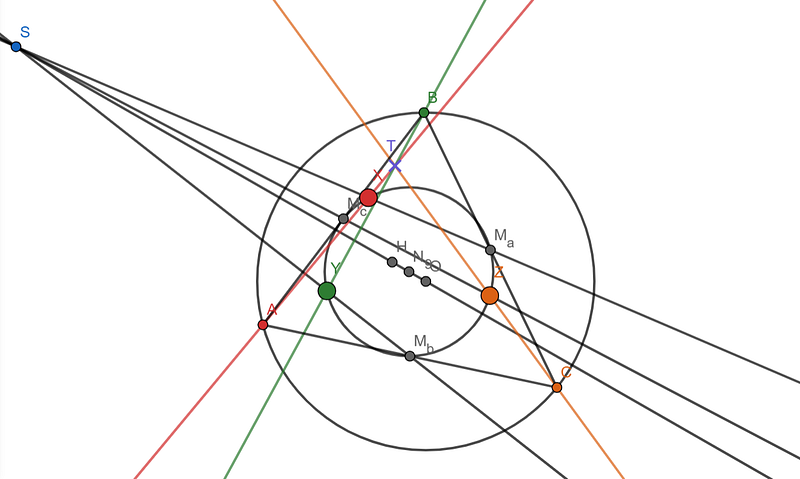

At first, this problem might look intimidating. And so it is. In fact, it was the hardest problem in the United States IMO Team Selection Test that year. However, when visualizing geometry as the art of polynomials, this is no longer the case. We will return to this problem in a while, once we have developed the tools to solve it.
To start off, we shall define the real projective plane.
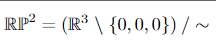
In other words, the real projective plane is the set of triples of real numbers (excluding the zero point) up to homogenization. Homogenization involves dividing the three numbers by the same amount. In other words, (4, 6, 1) and (8, 12, 2) are the same point as (4,6,1) is formed by dividing all the numbers in the triple (8,12,2) by 2. This provides a new line which we previously did not have. This line is called the line at infinity and considers the case where the third coordinate is 0, from which we cannot obtain a triple of the form (a,b,1). This will be important later on when we develop this new way of seeing geometry. In layman’s terms the real projective plane would just be getting the real plane and adding in a line containing “the intersections of each pair of parallel lines”. This line is the line at infinity.
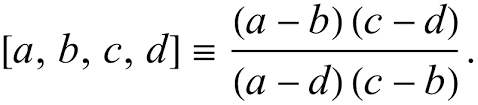
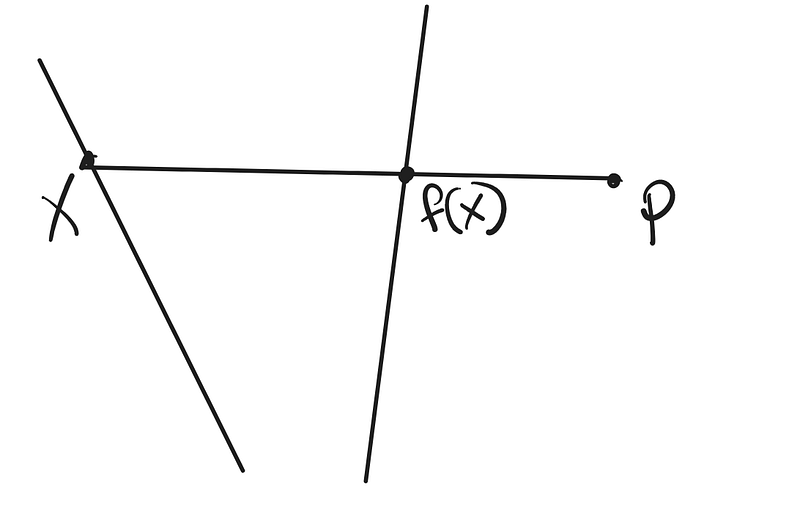
We also need to define a projective map. A projective map is just a map that preserves cross ratio.
This might seem unintuitive at first. The reason this is actually useful is the fact that it is an invariant under many transformations. For the purpose of this article, this is not essential. It is sufficient to know some examples of projective maps such as
· Rotation
· Homothety (scaling)
· Second intersection of circles
· Perspectivity
At this point, we can now define a moving point and a moving line.

In other words, a moving point takes in the fourth dimension (time) and returns the other three dimensions (actually two due to homogenization), that is, returns the position of the point at that time.
A moving line is the same as a moving point, yet in the case of a moving line, we have that the three polynomials actually determine the line

Again, unique up to homogenization.
We have now been able to express most geometry statements as polynomials so that is some progress. However, this is quite useless if there is nothing we can do with these polynomials. A way in which we could try to use them is by finding their degree. The first step is to define the degree of a moving point and a moving line. This is defined as the maximum degree of A(t), B(t) and C(t). Most geometry problem statements have conics (usually circles), so lets see what happens when we take a projective function
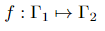
Where the gammas are either a line or a conic. It turns out that for some moving point P on the domain of the function,
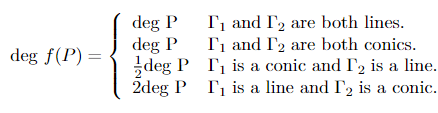
This is known as the conic doubling theorem. There is another technique to get the degree of a moving point which is known as The Moving Points Lemma or Zack’s Lemma. Consider two moving points
We have that the moving line XY has degree
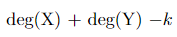
Where k is the amount of “degenerate cases”, that is, when X and Y are the same point. The proof of this we shall leave at the end, as it is not extremely important for the sake of this article.
Dually, we can find the degree of the moving point lying on the intersection of two lines
which would be
Where k is again the number of “degenerate cases”, that is, when both lines are the same line.
Reminder: parallel lines intersect at a point on the line at infinity so this case is not degenerate!!!
So now we have been able to find the degree of moving points but there’s still a problem. There’s no way of using that to our advantage. For that, we shall observe that the claim that three points X,Y, Z are collinear is a polynomial of degree deg(X) + deg(Y)+deg(Z). The proof of this will be given at the end of the article. Dually, we can establish the degree of the polynomial for the claim of the concurrence of three lines is

Roots of these two polynomials occur when the points are collinear / the line are concurrent.
We want every value of t to be a root of the polynomial. Therefore, we need to prove that this is the zero polynomial, in order to establish that the three lines are concurrent / three points are collinear no matter where the moving point is. Therefore, we need to check that it has

roots where X, Y and Z can either be lines or points by the fundamental theorem of algebra. That is, we need to check that the statement holds for
different positions of the point.
Leave any comments on this post / solution to the USA TST 2015 p6 in the comments!
Solution to it will be posted in the next post!
— Credits to Krishna Pothapragada, who taught me this method in the first place!