
Car and tire dynamics at the limits of handling (Part I)
Formula 1 cars can swift through corners at more than 5g, and after twenty years watching the sport, still fascinates me. Really. And it gets even more mind-boggling once you realise that this acceleration is entirely produced by the grip of tires. To push the tires into their operating window and extract their maximum performance is key in Formula 1. All the dynamics, the power of the engine, the energy of the brakes, ultimately is imprinted to the asphalt by the tires. So we need to talk about tires!
In this blog, you will read about how tires generate grip, about what parameters dictate the grip levels, how this grip can be modelled mathematically, how it is effectively controlled by the drivers, and how it affects the car dynamics. This blog is the first part out of two, which covers straight line acceleration and braking. Cornering and lateral forces will be covered in Part II.
There are many articles on internet about tire modelling, but what makes this one powerful, is that through simulations you will see them in action fitted in cars, which gives you a broader insight on how they really work.
Understanding straight-line acceleration and braking
A tire is free-rolling when it rotates at a rate, ω, such that the points at the contact patch move with the same velocity of the tire hub, v. This rate is ω=v/R. Under these assumption, and if we neglect the rolling resistance, the tire produces zero grip and its speed stays unchanged. If we roll a carpet around the tire, we would see that it is left on the road perfectly unwrinkled.
The velocity of the contact point, vc = v-ωR, will be zero. Under real conditions, tires need to violate this condition to generate grip.
If the tire rotates faster than v/R, the velocity of the contact point will be negative. Friction, which opposes movement, will originate a forward force. Hence, if ωR>v, grip is positive and it drives the tire forward. It can be understood if one thinks that the tire tries to compress the asphalt as it moves, which counteracts pushing the tire forward.
Opposingly, a decelerating tire rotates slower than v/R, the velocity of the contact point vc = v-ωR is positive, which results in a backward friction force. A carpet rolled around the tire will be left in the road stretched, pulling the tire back.
An extreme situation is the case of a locked tire, ω=0, where the velocity of the contact point is the same as the wheel hub, vc=v.
Tire grip characteristics and modelling
Tire grip can experimentally determined via tire test rigs, where the tire rolls over a surface while friction is measured by gauges as a function of several parameters [1],
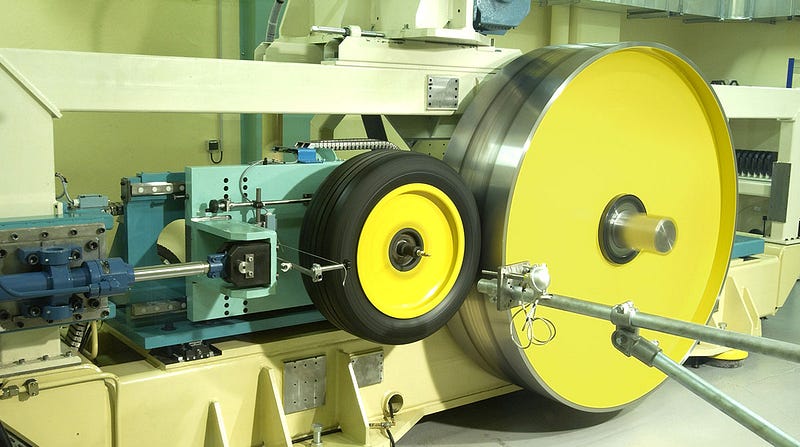
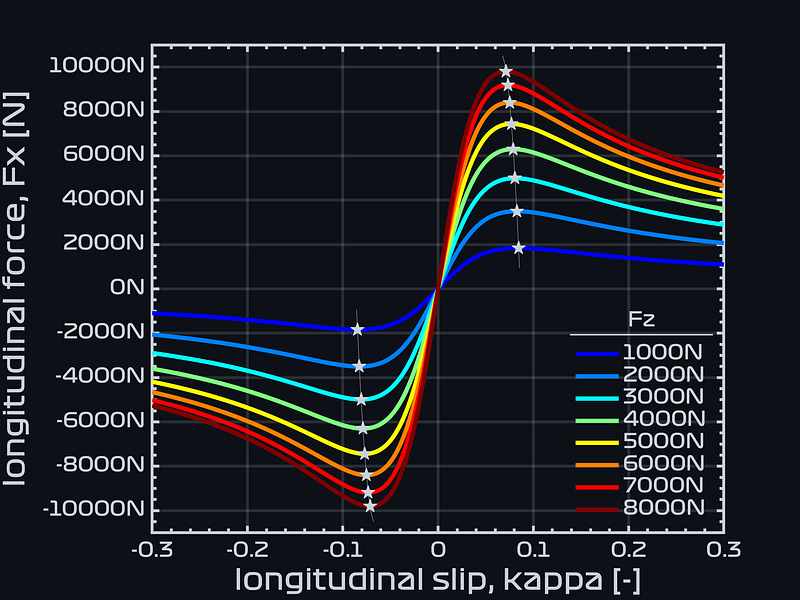
Experimental measurements show that the grip generated by friction depend on the magnitude of the contact point velocity and the normal load Fz (how compressed the tire is to the road). Do you remember the high-school physics class when you were told that F=μ·Fz? Well, in real tires it is very non-linear and it looks something like this.
Usually, the longitudinal slip, kappa, is used instead of the contact point velocity,

which is positive when the tire rolls faster than its hub motion (acceleration) and negative otherwise.
In the plot, we see that grip depends on the normal load and the longitudinal slip. What you need to understand, is that normal load depends on the car-setup and longitudinal slip depends on the application of throttle/brake by the driver. Hence, to find the maximum grip both car and driver are crucial:
First, grip increases with normal load, that is, how much the car presses the tire against the road. It is mostly dictated by the car set-up: downforce, car weight and masses distribution, chassis geometry and suspension settings. In the plot, hotter colors mean higher normal loads.
Second, the driver must use the throttle and brakes to find the longitudinal slip that maximises grip. These points have been marked with stars in the plot. Here is when the best drivers stand, such that they can feel precisely this dangerous sweet spot where tires are squeezed to the maximum while keeping control.
It is important to remark that finding the grip peak is very delicate as grip decreases very abruptly once it is passed. Here is when drivers lose control and the car slides far from ideal.
Mathematically, the curve above is obtained using the well-known ever-popular Pacejka magic formula [3],

In particular, the plot belongs to the Formula 1 model presented in [2], whose formula is

Car acceleration simulation: finding the throttle sweet spot
Let’s fit the tire with characteristics described in the previous section into a car and enjoy some simulations.
Considering a Formula 1 car that cruises at 50km/h, we all know that going wild in the throttle at these low speeds without electronic traction control is a really bad idea, but just in case…
Lesson learnt. Why did the car lost control? Well, if the driver uses too much throttle it pushes the tire to longitudinal slip values past the grip peak. With this excessive slippage, the tire loses also its capability to control the car’s balance (we will cover this in the Part II of this series) and it spins.
But most importantly, the car fails its mission of accelerating. Due to the crazy slip levels, the poor generated accelerating force is way below those the tire capabilities, hence the car barely accelerates before losing control.
The best drivers are capable of extracting the maximum performance from the tires. In this case, the driver will apply the throttle smooth enough such that the slip levels are within the operating window.
In this simulation we see how the ideal driver finds the maximum grip out of the tires by maintaining the slip as close as possible to the peak value. We see that the grip increases as the velocity increases, thanks to the downforce. As the grip increases, the car reaches a velocity where the engine cannot provide enough torque to overspin the wheels, and the driver can finally use the full throttle.
But this equilibrium is delicate and hard to achieve. Lets imagine a driver that tries to find the sweet spot by pushing slightly a bit over the edge, and suffers overspin. Then, after it backs off the throttle to regain control, it pushes hard again. Its acceleration will be non-optimal and it will lose valuable meters with respect to the ideal driver.
In conclusion, tire grip is very non linear which makes it tricky to handle. When we drive our 110cv cars on the highway, we stay on the linear and safe zone and there is never a risk to lose control. Race drivers, however, need to drive the tires to the limits of handling. In this point, there’s the risk of exceeding the peak and the sudden loss of grip. Here is where the skill of the drivers stand, so that they can extract the maximum out of the tires while keeping total control of the car.
Car braking simulation: front brakes, rear brakes, or both?
To decelerate, the driver needs to bring the tires into the negative slip area using the brakes. The situation is similar to the acceleration: the driver should find the negative grip peak by applying the correct amount of pressure into the brake pedal. Too much pressure could end up in tire locking, when kappa=-1.
As an example, let’s start with a car cruising at 320km/h, and suddenly apply all the pressure available to the brakes
We see that initially the tires have heaps of grip available due to the very high downforce, and the full brakes cannot lock them. In this case, the driver gets the maximum deceleration possible. However, as the speed decreases, the downforce decreases too, arriving at the situation where the braking force exceeds the available grip from the tires, and they lock (kappa=-1.0).
From the moment the tires are locked, the deceleration decreases notoriously and the tires grip is not exploited at all. Hence, drivers must adjust the brake pressure and progressively lift the brakes as the speed decreases. As in acceleration, the job of a driver is to find the sweet delicate spot where the grip is maximized.
The next question is: are front brakes more effective to brake in straight line than rear brakes? The answer is yes. Why? Because deceleration inertia forces load the front axle and thus the front grip is higher. This effect is called the weight transfer, where the effective weight shifts from rear to front as the car decelerates [4].
Just for the fun, let’s run a simulation comparing a car with only front brakes to a car with only rear brakes.
In this example, the Red-bull brakes with the front disks only whereas the Ferrari uses the rear ones. This is why kappa is zero for the Ferrari in the front grip plot (left), and the same for the Red-bull in the rear grip plot (right). We see that the Red-bull decelerates faster since the higher grip of the front tires allows its driver to apply more pressure to the brakes.
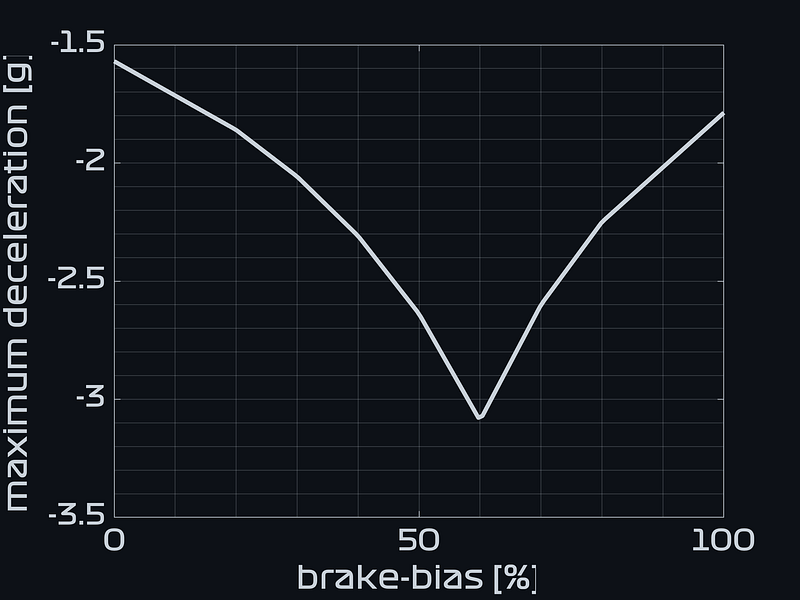
Real cars brake with both axles simultaneosly. It would be ideal to control each axle brake pressure separately, but in practice there is a single brake pedal, and its pressure is distributed along the two axles. This distribution is the brake-bias,

The brake-bias represents the fraction of the brake pressure that goes to the front brakes. Hence, brake-bias=100% leads to braking with only the front tires and brake-bias=0% to braking only with the rears. Usually, Formula 1 drivers use values around 56%-60%. For example, at 150km/h, the maximum deceleration is found with a brake bias of 60%.
Conclusion
Tires are fascinating and are fundamental to vehicle dynamics. The achivements from all the other disciplines such as aerodynamics, power units, chassis design, or suspensions, need to pass through the ultimate filter of the grumpy tires. We have seen that tires have a sweet spot where the performance resides, and that drivers need to look for it.
In this first part of the series, we have concentrated on straight-line acceleration, which are controlled by the throttle and brake pedals. This will be followed by a Part II, where we will discuss lateral grip and its effect on cornering.
For these simulations, I have using my own laptime simulator, Fastest-lap, which is totally open source and free. In this link you can find the MATLAB scripts and the data used to generate these simulations.
If you like this content, you can follow me on twitter (@fastestlap_f1), LinkedIn, YouTube, and why not, here in Medium too (Juan Manzanero | Fastest-lap).
References
[1] MICHELIN Engineering & Services





