
Building a Drone — Getting Started
Introduction to drone mechanics, components and design
Drones are fascinating little machines that are taking over the world. Today, they are being applied in several critical areas such as surveying, shipping/delivery, emergency response, disaster relief, monitoring — crops and wildlife, aerial photography, geographic mapping and so on.
Learning drone-engineering will expose you to an amazing world of possibilities. Whether you are a software engineer or just a hobbyist wanting to fly, it is an immersive experience like no other. It will even enable you to develop Autonomous Drones with modern machine learning tools and RaspberryPIs.
This getting started guide will give you an overview of drone design and introduce you to the various components involved.
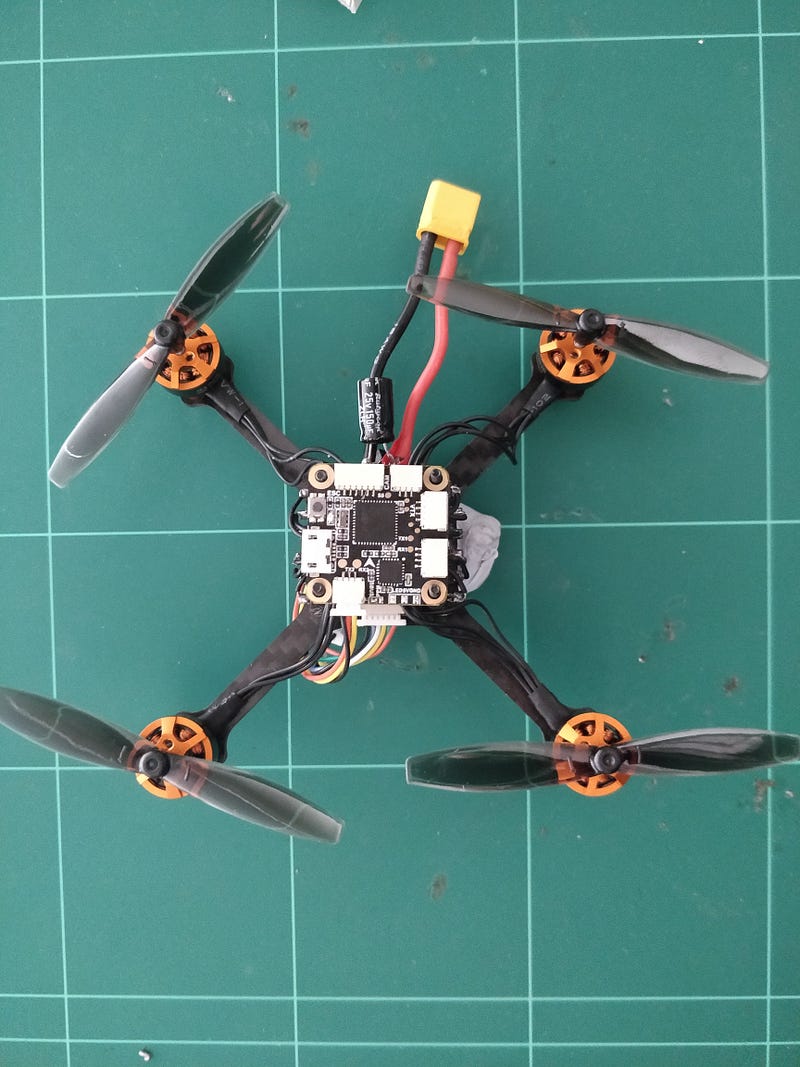
There are various types of drones — from fixed-wing RC planes to hexacopters and even more advanced designs. But as you might know, a quadcopter is easily the most famous of them all. It is a helicopter with 4 rotors that generally have two spinning in the clockwise(CW) direction and the other two in counter-clockwise(CCW) direction, bringing the total angular momentum to zero — allowing the drone hover in place.
Design outline
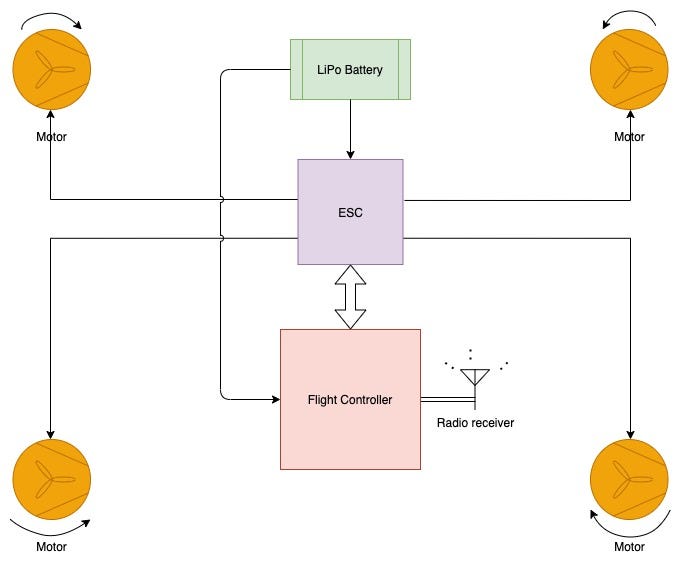
Basic Building Blocks Of A Drone
- Drone frame
- Motors + Propellers
- ESC (electronic speed controller)
- Flight controller
- Batteries
- Radio transmitter-receiver
Drone Frame
A drone frame will hold all the components of the drone. These are usually very light and strong; made out of materials like carbon fibre. All other parts such as the motors, radio receiver, flight controller, ESC, power distribution board all go onto this frame.

Motors + Propellers
These are usually Brushless DC (BLDC) motors that have high RPM to produce high thrust for the lift and quick changes in movement. They can be an in-runner or an out-runner BLDC motor. The one I’m holding in the image below is an out-runner BLDC motor because the outside enclosure is the rotor (which houses the permanent magnets).

A BLDC motor has 3 incoming wires, one for each phase/winding that is activated/controlled via an electronic speed controller to produce the rotation. And propellers are mounted to the motors and are chosen accordingly to give maximum thrust/lift to the drone.
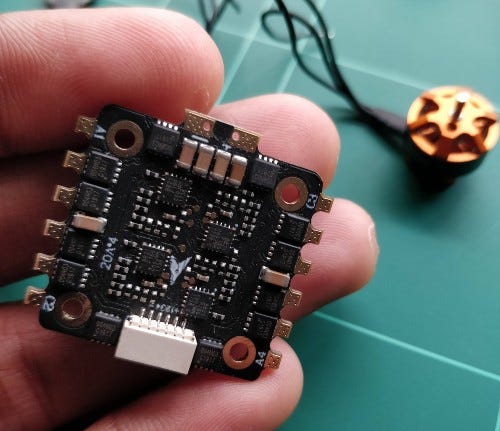
ESC (Speed Controllers)
An ESC is an electronic speed controller which is the circuitry that drives the motors. A Brushless motor will not work without driver circuits. They need their winding coils to be energised appropriately to pull the rotors to catch up with the speed of the electronic pulses. These pulses can be PWM (pulse width modulated) signals or newer ones like DSHOT/MULTISHOT protocols. In short, they speak the language necessary to rotate the motors.
Flight Controller
A flight controller is the brain of the drone and does thousands and thousands of calculations in seconds to maintain flight stability. It watches the drone’s state (axis/tilt, speed, etc) and instructs the ESC to energize the motors accordingly to move the drone. It has a gyroscope and an accelerometer built into it that helps maintain the stability of the flight. When you instruct the drone to move ‘forward’ on your radio transmitter, the FC (flight controller) will translate that to appropriate speed/drive signals to each motor. That produces an overall effect to move the drone forward. It also does this by concurrently taking in the inputs from other sensors (gyro, accelerometer).
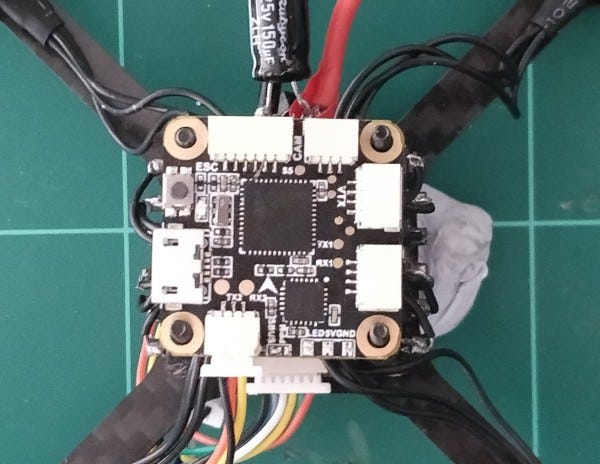
Flight controller comes with built-in firmwares and softwares that let you connect it to your computer over USB for setup and configuration.
Batteries (Power System)
The batteries used mostly in hobby quad-copters are Lithium Polymer (LiPo) batteries. These batteries are small but come with high current discharge capacity needed to drive BLDC motors and provide enough juice to power, not just the motors but also the ESC, flight controller, radio receiver, a camera/VTX and everything that’s on board.
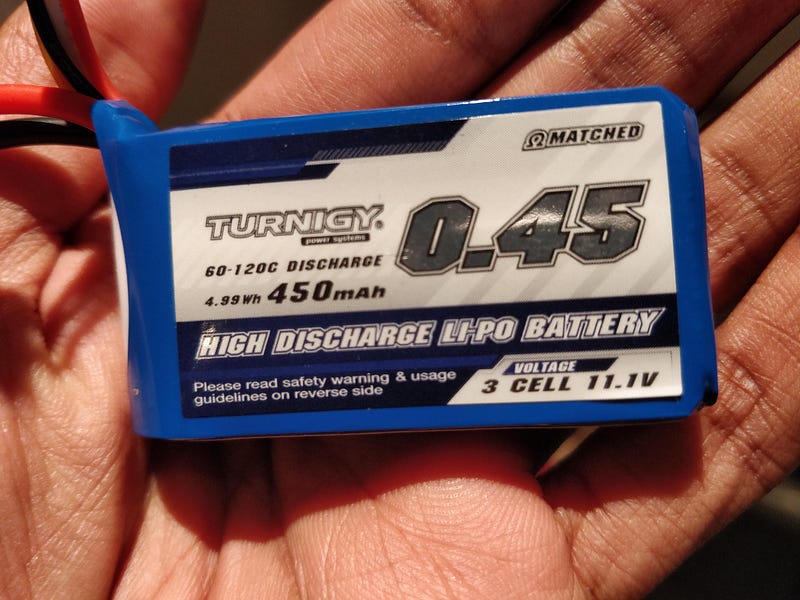
Some of the key specifications in a LiPo battery are — voltage rating, current capacity and discharge capacity. The voltage rating in LiPo batteries is reflected in their S-rating (1S, 2S, 3S, etc.) which reflects the number of cells placed in series. Each LiPo cell is 3.7V and hence the standard is as follows: 1S LiPo — 3.7V, and 2S — 7.2V, and a 3S — 11.2V and so on. The current capacity (measured in mAh) is the juice inside the battery. A 1200mAh battery will last longer than a 300mAh battery. The discharge capacity on the other hand is the amount of current a battery can delivery without breaking down. This is called the C-rating; a (450mAh | 70C) rating means that the battery can deliver up to 70x450mA current at any point in time. Because these have high current discharge capacity, you need to be careful while using these batteries.
Radio Transmitter/Receiver
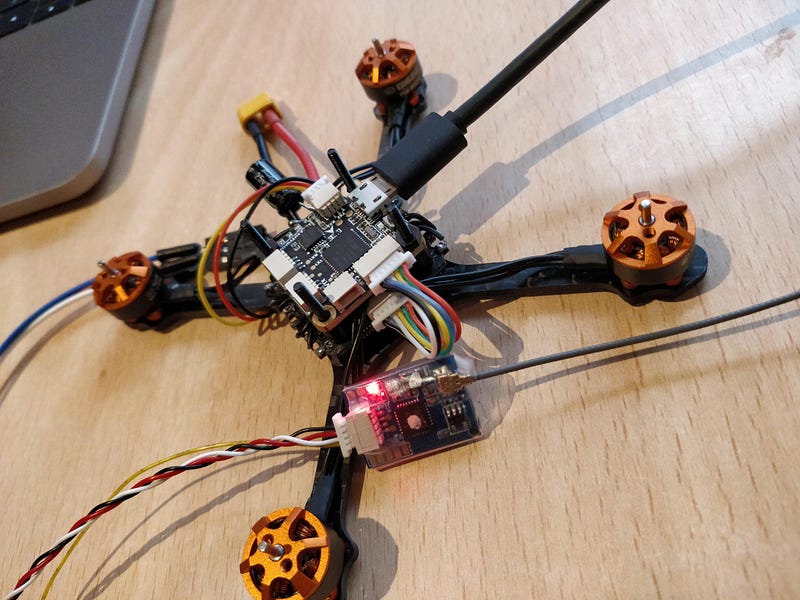
Needless to say, radio transmitters and receivers simply let you control the drone wirelessly. RC toys have been around for a long time and this is very similar. The radio receiver sits on the drone and is bound to the transmitter that’s controlled by the user. The radio transmitter-receiver binding process usually involves holding a designated button on the transmitter and/or receiver while starting up (this varies with different models).
The radio transmitter protocol mostly used by these hobby drone radios is ADFHS (automatic detection frequency hopping system). The receiver receives the data from the transmitter and passes it to the flight controller.


The signal data is sent in channels such a throttle, yam, pitch, rudder., etc. Most radio transmitters and receivers support 6–8 data channels. Some even support up to 18 channels if they use advanced receiver protocols like SBUS, IBUS. Note that you should match the receiver protocol between the flight controller and the receiver.
These are the basic building blocks of a drone and the pre-requisites you need to know. In the next part, we will look at how to choose these components and put them together.





