
A Brief History of Thinking Machines
Chapter 3: Pioneering Progress in the 1960s
The third installment on the history of thinking machines.
The 1960s marked a pivotal developmental period for machine learning, transitioning from theoretical foundations towards practical applications. While previous decades established critical conceptual building blocks, the 1960s featured working systems tackling real-world challenges through learned pattern recognition, problem solving, motion control and more.
A pioneering achievement arrived in 1960, when engineering students created the Stanford Cart. This remote-controlled vehicle demonstrated emerging capabilities for video-based navigation.
The Stanford Cart was an early mobile robot platform. Originally constructed in 1960–1961 by Stanford graduate student James L. Adams, the cart was a basic wheeled platform with onboard cameras and radio controls to allow remote driving. Adams used the cart to study the effects of communication latency on teleoperated vehicle control, showing fundamental limitations when delays approach a few seconds. The cart later found use in pioneering autonomous driving experiments at Stanford’s Artificial Intelligence Lab in the mid-to-late 1960s.
The initial work on the Stanford Cart was motivated by questions around controlling remote lunar rovers. Adams had been working on NASA’s Project Prospector, which assumed a Moon rover could be teleoperated from Earth by a human driver using video and radio links. Adams challenged this thinking by constructing a simple wheeled cart equipped with motorized steering, a video camera, and long cable back to a control station. By adding variable delays, he demonstrated in his Ph.D. dissertation that teleoperation became unreliable at speeds over 0.2 mph when latency reached the 2–3 second round trip time to the Moon.
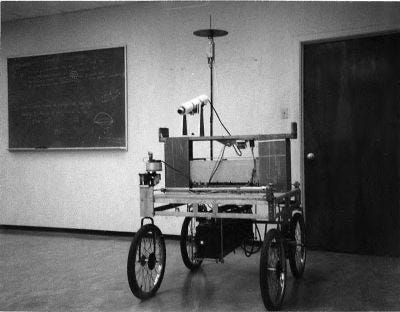
The Stanford Cart
Follow-on work by Stanford student Paul Braisted looked to improve controllability by predicting the cart’s path based on control inputs. This predictor approach allowed driving up to 5 mph by offsetting delays, yet fundamental limitations remained for obstacle avoidance. Further teleoperation research stalled in 1962 with President Kennedy’s commitment to send astronauts to the Moon, eliminating the need for robotic precursors.
The Stanford Cart ultimately found renewed purpose as a testbed for autonomous vehicle research. Les Earnest of Stanford’s Artificial Intelligence Lab spearheaded robotics experiments with the cart starting around 1966. Joined by student Rodney Schmidt, they added radio control and processing to close the control loop on campus. Early successes included vision-based line following at slow speeds. Prof. John McCarthy took interest as the lab’s director, but performance remained limited by available computational horsepower.
In the end, the simple yet seminal Stanford Cart paved the way for future autonomous systems through its pioneering early experiments. Conceived to probe teleoperation, the cart’s legacy lies in early robotic vehicle demonstrations that presaged modern self-driving capabilities. As computational power has caught up with ambition, today’s autonomous vehicles trace conceptual origins to 1950s-60s efforts like Adams’ cart exploring remote and self-directed mobility.
In the early days of artificial intelligence research, computers were scarce commodities. Yet in 1961, Scottish scientist Donald Michie found an ingenious way to demonstrate machine learning principles by constructing a computer entirely out of matchboxes. This system, dubbed MENACE (Matchbox Educable Noughts and Crosses Engine), could actually play games of tic-tac-toe against human opponents. Through a simple yet groundbreaking reinforcement learning approach, it improved its strategy over time by eliminating losing moves and favoring winning ones.
Michie was motivated by both a wager claiming such a mechanical computer was impossible, as well as his inability to access traditional computing equipment for AI experiments. So 304 matchboxes, colored beads, and a look-up chart came together to embody a playable game engine. Each matchbox represented one possible tic-tac-toe board permutation; beads within signified allowable next moves. By physically removing beads for losing moves, while adding extras for winners, MENACE tuned its strategy. After sufficient training games, it became a formidable opponent.
MENACE competed respectably against Michie himself in its first full tournament in 1961. He explored different opening patterns to challenge its evolving skill. The success of this pioneer reinforcement learning system proved concepts that found applications in later artificial neural networks. It also cemented Michie’s reputation in machine learning, including further commissions to program simulations of MENACE.
In the end, MENACE overcame skepticism by demonstrating that intelligence could emerge from deceptively simple parts — from matchboxes rather than microchips. Its beads and boxes physically embodied essential learning loops that allow strategic mastery. And building this unique computer required only basic materials, but tremendous creativity from Donald Michie. MENACE remains an iconic milestone in AI’s early history, testifying to innovation born from scarce resources yet unlimited vision.

300 Menacing Matchboxes
Menace illustrated new techniques for structured reinforcement learning based on game outcomes. Three years later, Joseph Weizenbaum developed ELIZA — the first conversational computer program. ELIZA showed machine learning’s early promise for natural language processing by analyzing and responding to human statements.
ELIZA emerged in the mid-1960s as one of the first natural language processing programs to powerfully demonstrate computers’ potential for human-machine interaction. Developed by MIT scientist Joseph Weizenbaum between 1964–1966, ELIZA simulated a psychotherapy session, processing input text and responding via pattern matching rules. Despite its simplicity, ELIZA convinced some users of genuine understanding, shocking its creator. Yet it also revealed risks when people anthropomorphize machines.
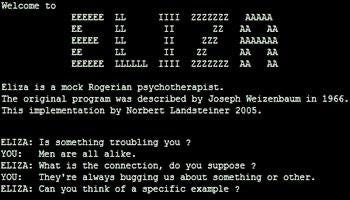
ELIZA screenshot
Weizenbaum’s goal with ELIZA was not true intelligence, but exploring communication boundaries between man and computer. Private funding for MIT’s AI Lab enabled his development of the DOCTOR script that became ELIZA’s signature. Using almost no contextual knowledge, it reformulated user input prompting deeper discussion — a clever parody of Rogerian psychotherapy for which understanding context didn’t matter. Weizenbaum named it after the literate flower girl in Bernard Shaw’s Pygmalion, though it could not actually learn from conversations as Eliza Doolittle did.
Written in Weizenbaum’s SLIP language, ELIZA identified “keywords” in input text to apply pattern matching rules that transformed sentences. It broke inputs down via “decomposition rules” and reassembled pieces per “reassembly rules,” with some randomized responses. Simple yet effective, these approaches drove chatbots for decades. DOCTOR script edits eventually allowed ELIZA’s application for other AI personas like the PARRY mental health patient in early bot dialog experiments.
When first unveiled, ELIZA amazed and disturbed observers in computing’s interactive early days. Some genuinely believed they conversed with a sentient being after just brief interactions. Weizenbaum’s secretary famously asked for privacy with the bot. While validating ELIZA’s technical achievement, the credulity also haunted Weizenbaum as AI’s potential downsides became clearer. His own book “Computer Power and Human Reason” later warned society against overreliance on computation.
Yet ELIZA’s legacy lives on as foundational in human-AI interaction research, natural language parsing, and modern chatbot design. Direct descendants like A.L.I.C.E. still build on its approaches even as machine learning eclipses earlier techniques. And MIT ultimately honored Weizenbaum’s pioneering efforts with the ELIZA source code’s addition to university archives for ongoing study. Over 50 years since its humble beginnings, ELIZA remains a touchstone demonstrating both the promises and perils of anthropomorphizing AI.
Arguably the decade’s crowning achievement came in 1966, when robotics researchers built a robot that integrated breakthroughs across machine vision, path planning, and decision logic to maneuver through a closed environment. The pioneering mobile robot is widely viewed as the grandfather of contemporary self-driving cars and drones.
This ambitious project took shape to create the first mobile robot that could perceive its surroundings and reason about them. Assembled at Stanford Research Institute (SRI), this pioneering automaton was dubbed Shakey, a momentous achievement of early artificial intelligence. Its trailblazing blend of logical planning and physical response presaged today’s autonomous systems.
Several Defense Advanced Research Projects Agency (DARPA) grants funded Shakey’s development over nearly a decade. The team, led by Charles Rosen, integrated cutting-edge capabilities in computer vision, navigation, and natural language processing. Weighing a ton, the robot univariate on a wheeled base, with a tower stacking components like cameras and range finders. A radio link connected Shakey to an offboard computer for control.

Charles Rosen posing with Shakey
Shakey’s extraordinary innovations started with visual perception and spatial modeling unheard of at the time. Its cameras captured terrain views to identify landmarks and map spaces in logical forms. Spatial reasoning abilities let Shakey plan multi-step routes around obstacles towards destinations specified in simple verbal commands. It even grasped some English vocabulary to parse basic movement goals.
The robot leveraged these senses and knowledge representations to manipulate objects purposefully, not just wander aimlessly. Goal-based formulas enabled Shakey to execute plans requiring pushing items like blocks between locations. In one famous 1970 LIFE magazine demo, Shakey located a ramp, positioned it to reach a platform, then pushed a block off the platform’s far side.
Shakey’s planning prowess relied on the novel STRIPS system and A* search algorithms, huge breakthroughs. STRIPS framed procedural goals and organized logical rules towards accomplishing them. A* efficiently charted optimal paths by minimizing estimated remaining distances to targets. These approaches profoundly impacted later automation systems.
As the first integrative mobile robot, Shakey served as an archetype guiding subsequent designs for decades. Itsstacked components formed layered control architectures reused widely since. Shakey also pioneered melding logical reasoning with mobility. Its groundbreaking blending of software insights and physical behaviors clearly portended coming waves of intelligent, useful robots.
No prior automation moved purposefully through space guided by its own senses and plans. Shakey’s innovations at computer vision, cognition, and task planning signify foundational AI achievements. This monumental demonstration system paved the way for present-day autonomous entities across industries. Heralded as the “first electronic person” in 1970, Shakey remains a technological icon representing AI’s enduring progress.
These systems demonstrated machine learning exiting the theoretical phase into practical applications for control, decision-making and human interaction. While operating on limited hardware within closed environments, the 1960’s pioneering projects established foundations being built upwards ever since.
The 1960s featured early machine learning adoption for real-world problems across automated vehicles, strategic gameplay, conversational dialogue and intelligent robotics. These initial working systems presaged machine learning’s expansive role in modern business and culture.